Thank you for your replay. Yes the joystick function works, BUT you don’t have reverse all other functions works fine but in rover applications it would be nice with reverse function, then you wouldn’t need a rc.
Just updated the to latest Windows 10 build 1803 and this seems to solve the problem, I can see the logos again on QGC v3.3.0
I have an issue with the new update that caused me to go back to the previous version. When planning a mission there is no way to fly a north-south pattern with an Entry point on the western side of the flight path. This is necessary when dealing with wind from the east, or any number of other reasons. I do like the new tap and spin the compass method for setting the flight path angle, I just wish I had more control over the Entry and Exit points. I was testing with a fixed wing I have not tried multirotor with this app yet.
A feature request I would like to see is the possibility to do an “emergency landing” or initiate a landing sequence in a way that will allow the user to take off and return to the last completed point, including a takeoff WP for fixed wing. This is helpful when changing batteries in the middle of a large flight. Currently, the workaround is to plan the mission and fly until you run out of batteries and remember where you left off so you can re-plan the mission over the remaining area.
I hope I’ve been clear thanks for reading this far!
1 Like
Just change the “Entry” to whatever position you want. You can change it to any of the four available “corners” of a north-south survey
This is already supported. Look for “Resume Mission” in here: Redirecting to latest version of document (master)
[quote=DonLakeFlyer]
Just change the “Entry” to whatever position you want. You can change it to any of the four available “corners” of a north-south survey[/quote]
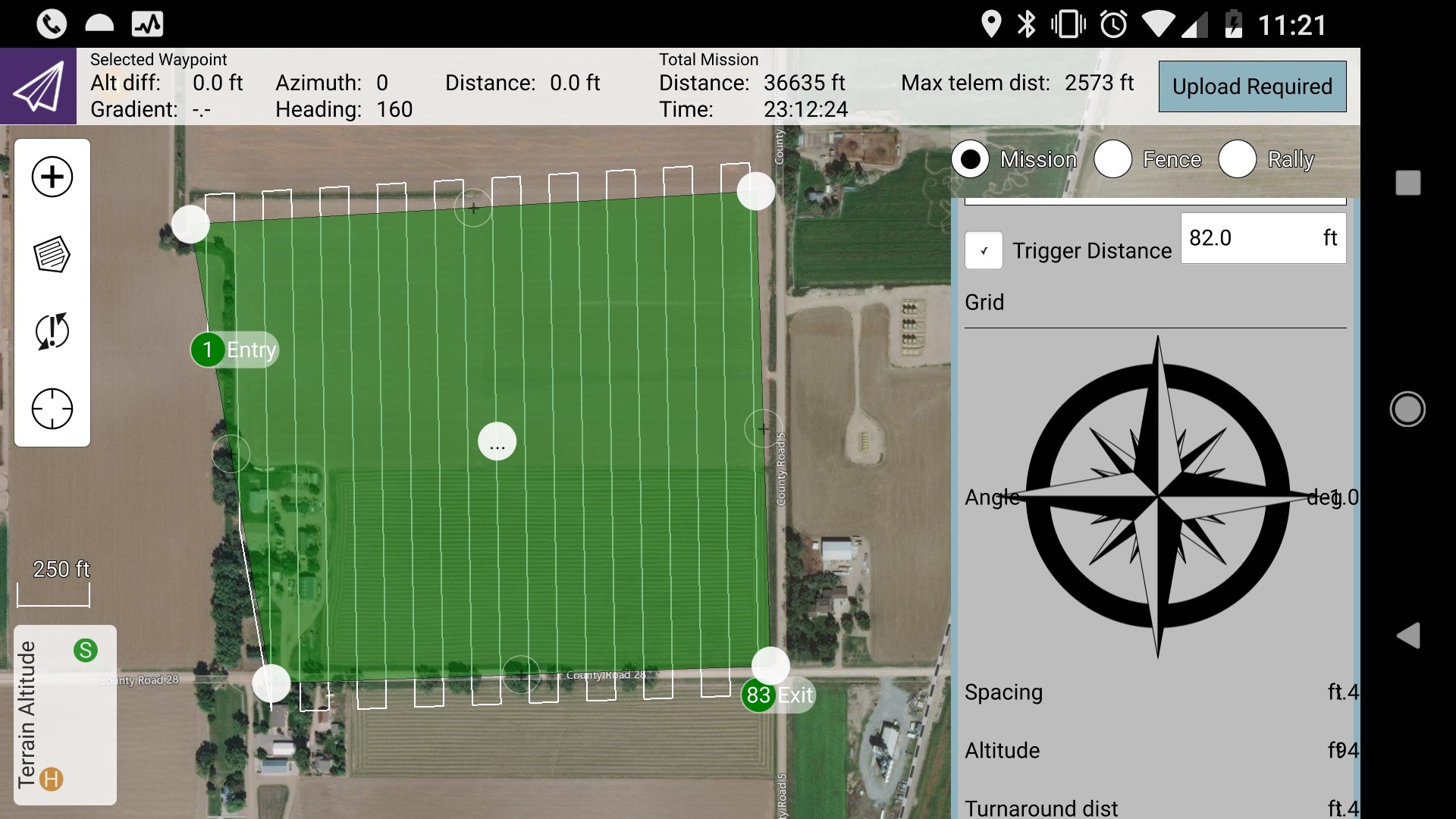
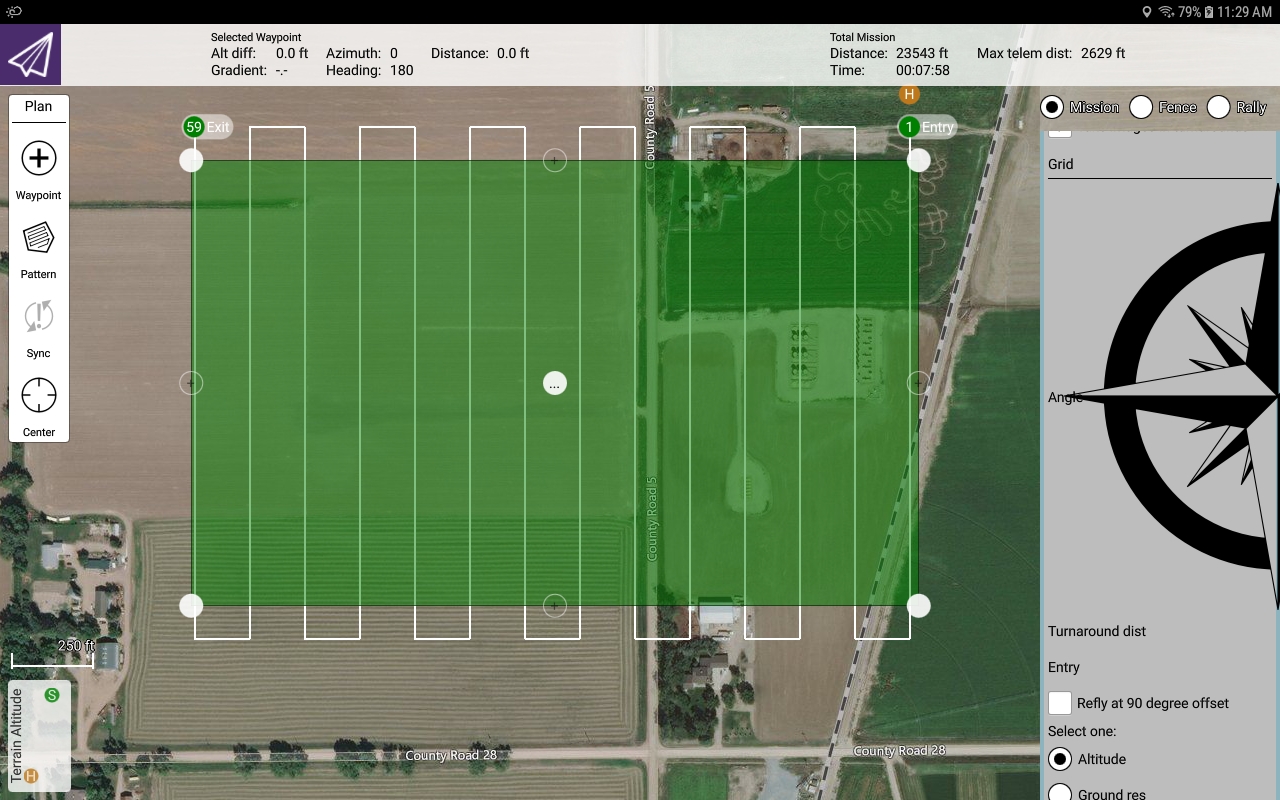
I wish it were that easy. In the previous version that’s how I did it. In the new version this has changed to a graphic of a compass that you rotate with your finger. On one of my devices I can rotate it 360 degrees and plan the mission I need. However, on my other device I am limited to only 180 degrees (only half the compass is shown on screen) and therefore I cannot put an Entry point where I need it.
Can you confirm that this is supported for Fixed Wing and not just Multirotor? After several attempts the Resume Mission procedure did not work for me or my fixed wing, hence the reason for my post.
1 Like
You are talking about “Angle”. I am talking about “Entry”. Those are two different things. There is an “Entry” field with a combo box next to it which allows you to select from Position 1 thru 4 which moves around the entry point to the four corners.
Yes Resume Mission works with any vehicle type. When you say it doesn’t work, what are the specifics on how it doesn’t work?
-
Yes, Angle and Entry are two different things. However, maybe you’ve noticed that when you rotate the Angle, the Entry and Exit points also rotate! Please see attached screen shot from two different devices, it’s obvious the formatting is off and not allowing me full control. Also you can see where the text “Entry” is on the screen, but tapping on it does nothing.
-
These are the specifics of how Resume Mission does not work with my Fixed Wing:
- I plan a mission over a field.
- I launch the drone and let it fly 1/2 of the mission.
- I initiate RTL and the drone starts the landing sequence and the drone lands.
- I change batteries while not disconnecting from QGC.
- Drone powers up, connects to tablet, and loads previous mission.
- No “pop-ups” appear and after launching the drone again it returns to WP 1 and starts the mission again.
Use a daily build of the Android version which has the massive compass thing fixed.
Your Resume Mission problems are going to require some more specific testing. Can you move that with details to a GitHub Issue and we can continue debugging it there.
But first double check Resume Mission using an Android Daily build as well. The Stable 3.3 Android is a little out of date with bug fixes since I haven’t kicked off a new version yet. Sounds like it’s time.
Got the daily build, looks great. Thank you I will do more testing.
Yes, that is a known problem.
I have some ideas for the software I’m proposing.
1- If possible, plan and fly menu can be merged.
2- If possible, a box for each category of missions. For example, just have a box for all waypoints and when click on that waypoint be displayed the position and height.
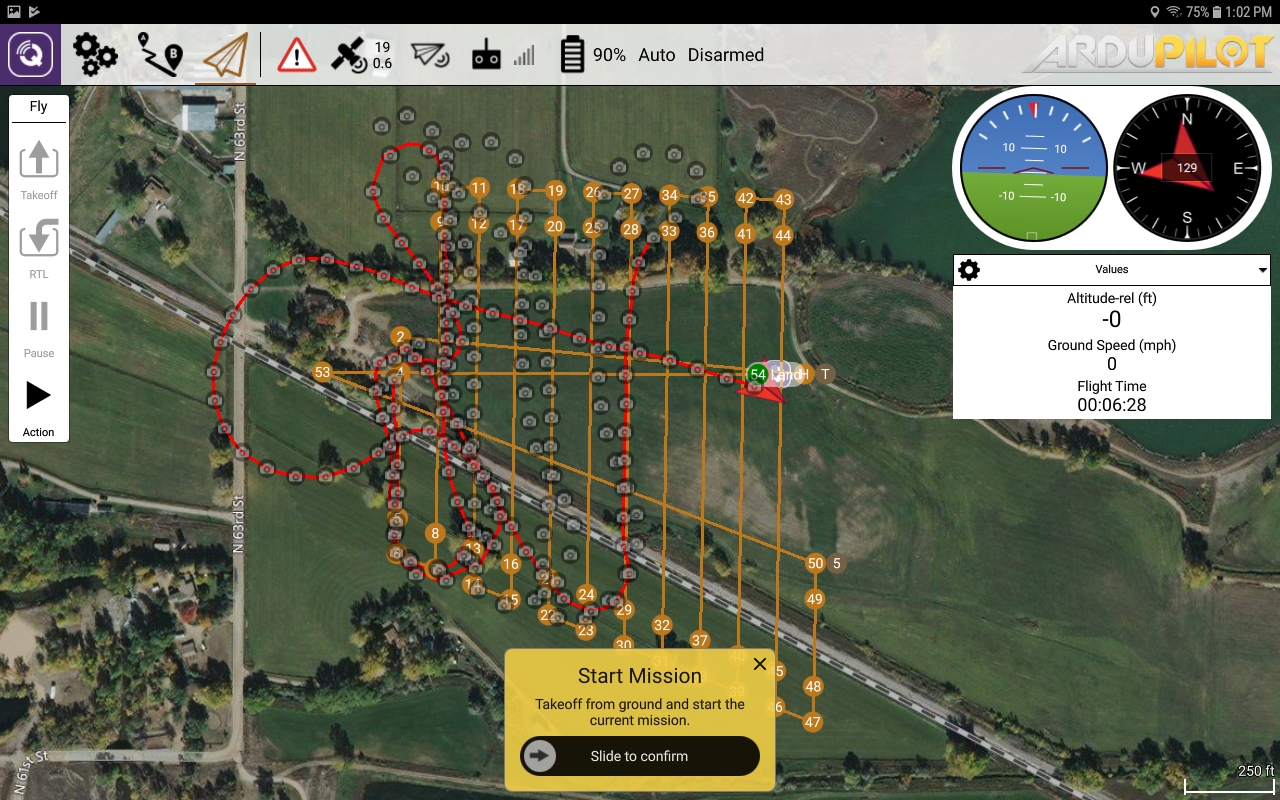
I flew today with a fixed wing Ardupilot drone with daily build version 3.3.0-258-g0507fb9bd
The “Resume Mission” feature did not work as described. After initiating RTL, the drone came in to land. I simulated a battery change by unplugging the drone for about a minute and powering it up again. The drone reconnected to QGC ok, but there was no attempt to rebuild the mission and the only pop-up I received was “Start Mission,” when activated I just received an error that it wasn’t supported for my vehicle type. This pop-up came on screen many times during my flights even though it did nothing.
Can you put an Issue into GitHub with details? Then we can continue there.
@DonLakeFlyer one of my helicopter customers was trying to get QGC to work with RFD900 radios and it keeps balking and says all the parameters were not downloaded. It works fine with standard 3DR radios and with USB connection. The RFD900 radio worked ok with MP.
Tried QGC on both Windows and Mac and got the same error with the RFD900.
Has there been any reports of the RFD900 radios causing this problem with QGC? Or some settings we’re missing?
I don’t know if Mission Planner gives an error it it doesn’t get the full set of parameters. So not sure that is an indicator of no problem.
For QGC this normally indicates a communication link problem like a very noisy link. After max retries to get all params it still fails.
Ah, ok. That makes sense. We’ll have to maybe contact RF Design and see what they have to say about it. Personally I do not like that design of sending the RC signal on 900 MHz. But a lot of people seem to be doing it.
So I was looking at the Mission Planner code and it does have a check for parameter count. So that leaves me a bit confused. Can you put an Issue into QGC for this. And then we can talk more there. I think it’s still a link noise problem. But don’t understand why MP would be clean and QGC not.
Ok, will do, right after lunch here.