Using a Matek F405-WTE flight controller flashed with ardupilot, I am able to connect via UDP to QGroundControl over UDP using the ESP module. However, I have an issue when connecting multiple vehicles, it appears as though they have both connected however I’m not sure QGC recognises them as separate vehicles? The radio button to switch between single and multi-vehicle does not appear and the data displays such as the battery status and the compass seem to be jumping between the two vehicles rather than having a separate result for each.
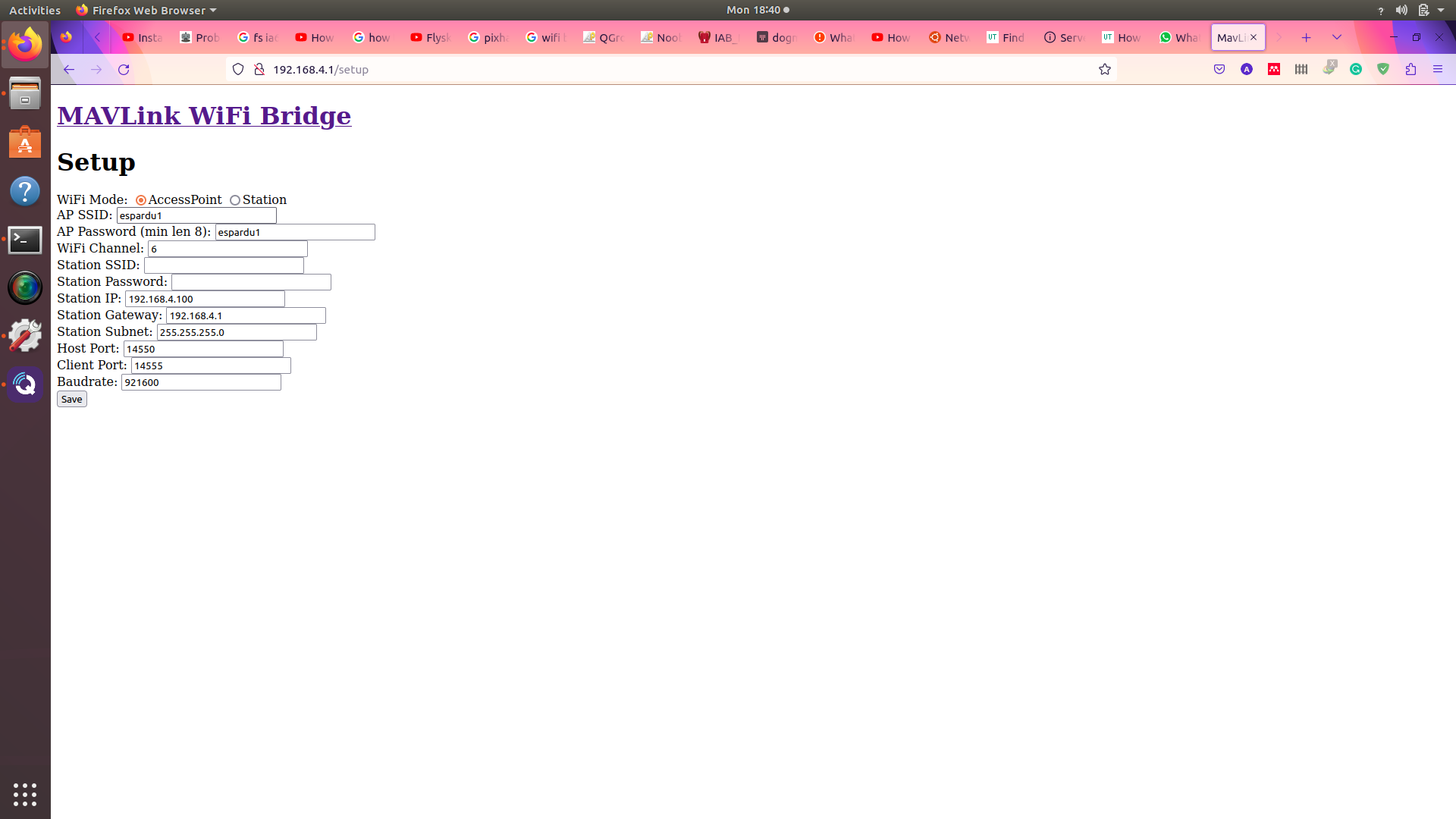
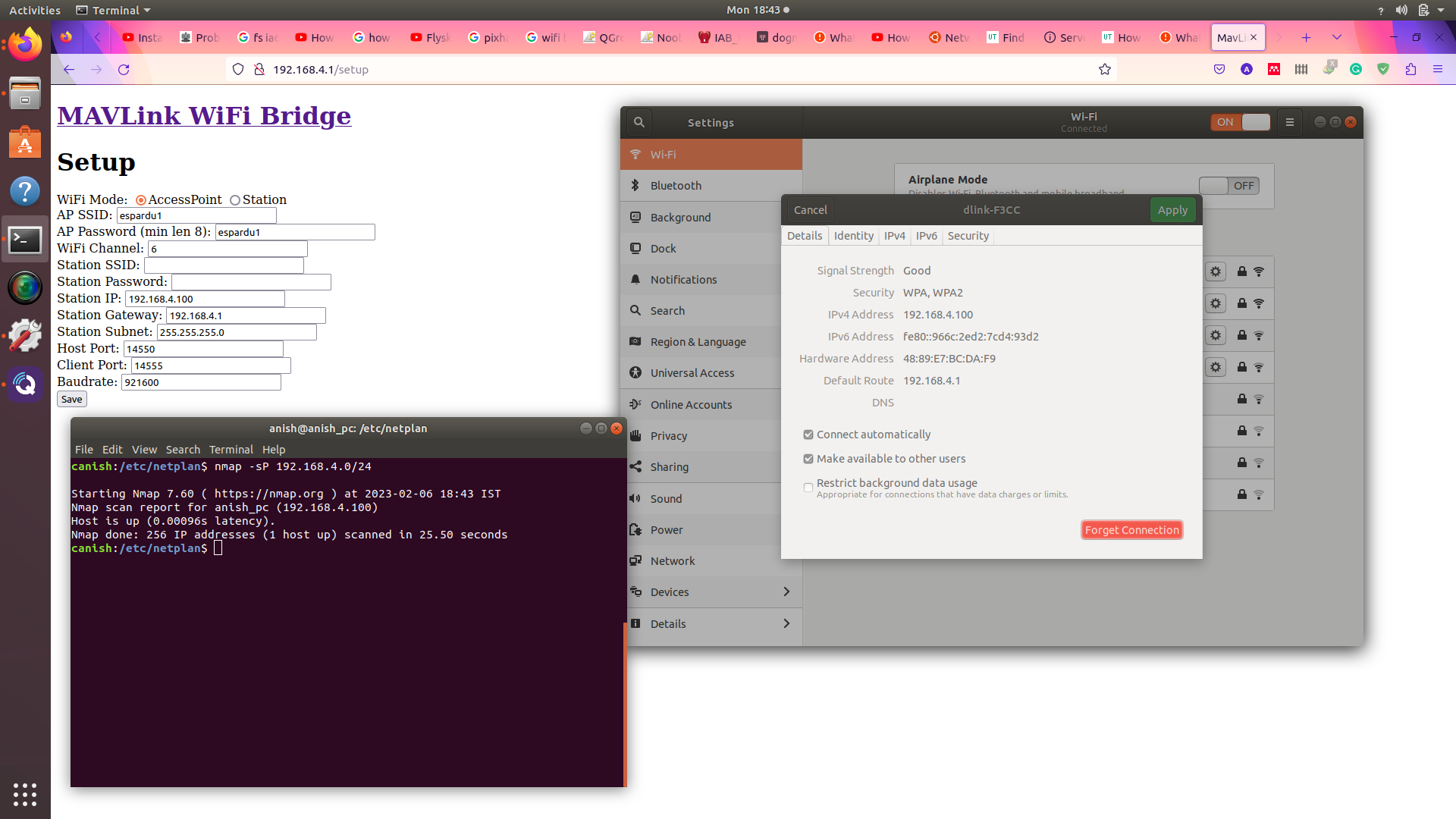
I’m assuming the issue is due to how the WiFi modules or the UDP connection was set up which is preventing QGC from distinguishing them but I’m unsure where I have gone wrong. The ESP modules have been put into station mode using the MAVLink WiFi Bridge and each was assigned a unique port. I established the UDP connections by going into QGC Application Settings → Comm Links → Add → Selecting UDP and entering the unique port. On the MAVLink WiFi Bridge I have tried changing the station IP as well to the IP of the individual modules on the network with seemingly no effect. The default values have been left for station gateway (0.0.0.0), station subnet (0.0.0.0), and client port (14555). I have the same issue if I connect the flight controllers via a usb serial port.
How can I have QGC recognize the flight controllers as two separate boards and display their data separately?
Thanks for any help and advice.
try to assign different SYSID_THISMAV numbers to the veichles (look into parameters of each)
Hello, I have also been trying to do the same but with a different flight controller. I have the pixhawk 2.4.8 running the arducopter firmware. I want to connect two of them to QGC using ESP8266. I have the ESPs put into station mode and have given my laptop a static IP so that they can connect to them. The ESPs are unable to connect to the static IP from my laptop. Only if this is done, I believe I can see them as different vehicles in QGC (Apart from assigning them different SYSID_THISMAV). I don’t have deep knowledge in communication networks. If you could please suggest to me where am going wrong, it would be helpful. Thanks in advance.