Hi.
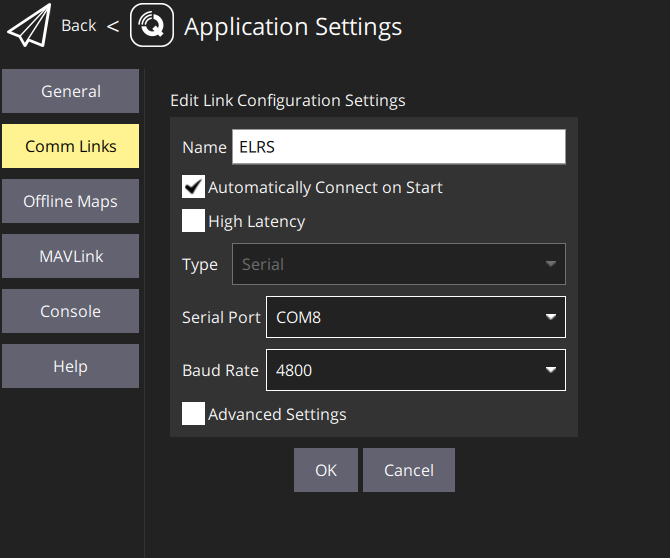
I run Mission Planner with ExpressLRS Airport without any problems so I tried to connect QGC with out any response. Mission Planner connects with 4800 baud and works well.
Here is my settings on QGC.
Regards //YB
Hi.
I run Mission Planner with ExpressLRS Airport without any problems so I tried to connect QGC with out any response. Mission Planner connects with 4800 baud and works well.
Here is my settings on QGC.
Regards //YB
@david_sastre @rmackay9 Thank you very much for your great contribution.
SIYI team has finished our tests for QGC 4.4 (Android) by following a standard SIYI procedure for app tests. Below are our feedback.
Testing Device:
Thanks for the feedback @SIYI
Click and drag: It is confirmed to not be nice on touch screens. It seems it only works nicely on desktop. We understand the issue, and it will be addressed.
Photo capture and video: Those have not been modified heavily lately. Those rely on mavlink camera protocol. For Siyi A8, Ardupilot implemented this mavlink camera protocol on its driver, and I think it works fine.
I am not familiarized with your ZT6, but assuming it talks directly with QGC, it needs to implement mavlink camera protocol, and if it talks through Ardupilot, The driver should be implemented in the autopilot side. Of course there could be some bugs on QGC side, but several mavlink cameras are confirmed to work just fine with QGC for a long time.
Basically if there is only one element able to control the gimbal ( GCS/Pilot ), that release/acquire control doesn’t matter. That is why it can be hidden optionally.
Zoom: The scope of this release never included this front, so it is expected. It could be done for sure, now we have everything at the mavlink level to associate gimbals and cameras, so besides zoom control we could adjust gimbal sensitivity based on zoom, etc. But it would require extra development.
Multisensors: Same as above. However, mavlink camera protocol supports this, you can make it work with it. Using mavlink camera protocol you can expose any parameter you like, main sensor among them.
There is room for improvement on this front too, but having support on your camera for that at the mavlink level will probably ease the ground for whatever we do next.
Thanks!
Hi @SIYI (and @david_sastre),
Thanks for the feedback.
In general, I don’t think the short-term solution to these issues is for Siyi to improve its mavlink support. Instead I think the solution is for QGC (and AP in some cases) to improve its ability to send camera and video control commands to the autopilot which in-turn controls the camera. There is already some work going on here to do this.
Hello Randy -
I’ve just this week gotten one of my Herelinks off the shelf and into a new copter build.
I hadn’t used one in over 6 months. So I began doing firmware updates for the Air Unit and the Ground Unit.
I was thinking/hoping that the update would incorporate the latest version of QGC - but after the update it’s still on V4.0.8. (Solex wasn’t updated either.)
Would you happen to know if CubePilot intends that it’s customers load a new .APK for upgrades to QGC for HereLink?
As info - I noticed that Solex has a “check for new version” and “update to new version” options. So upgrading to the new version of Solex was super easy. I wonder if QGC could have this functionality.
Hi @jstroup1986,
The standard build for Herelink does not yet included the latest version of QGC. I’ve heard from them that this is on the project plan but I don’t know when that will happen.
Until then, it’s relatively easy to upgrade the herelink manually to 4.4 and we’ve put instructions here on the AP wiki. This video also shows the basic process although it’s not specific to this QGC-4.4 release.
Adding a firmware update button to QGC sounds like a great idea and surely it has been raised before but I don’t see any issue in the QGC issues list.
Hi,
my observations are:
Setup:
Tanks for your ongoing great effort. Much appreciated.