Ok, thanks for the clear assessment. Thats what I was considering too. I thought my D gains were already quite low, but obviously i will lower them further and be more cautious regarding vibrations before starting the Autotune.
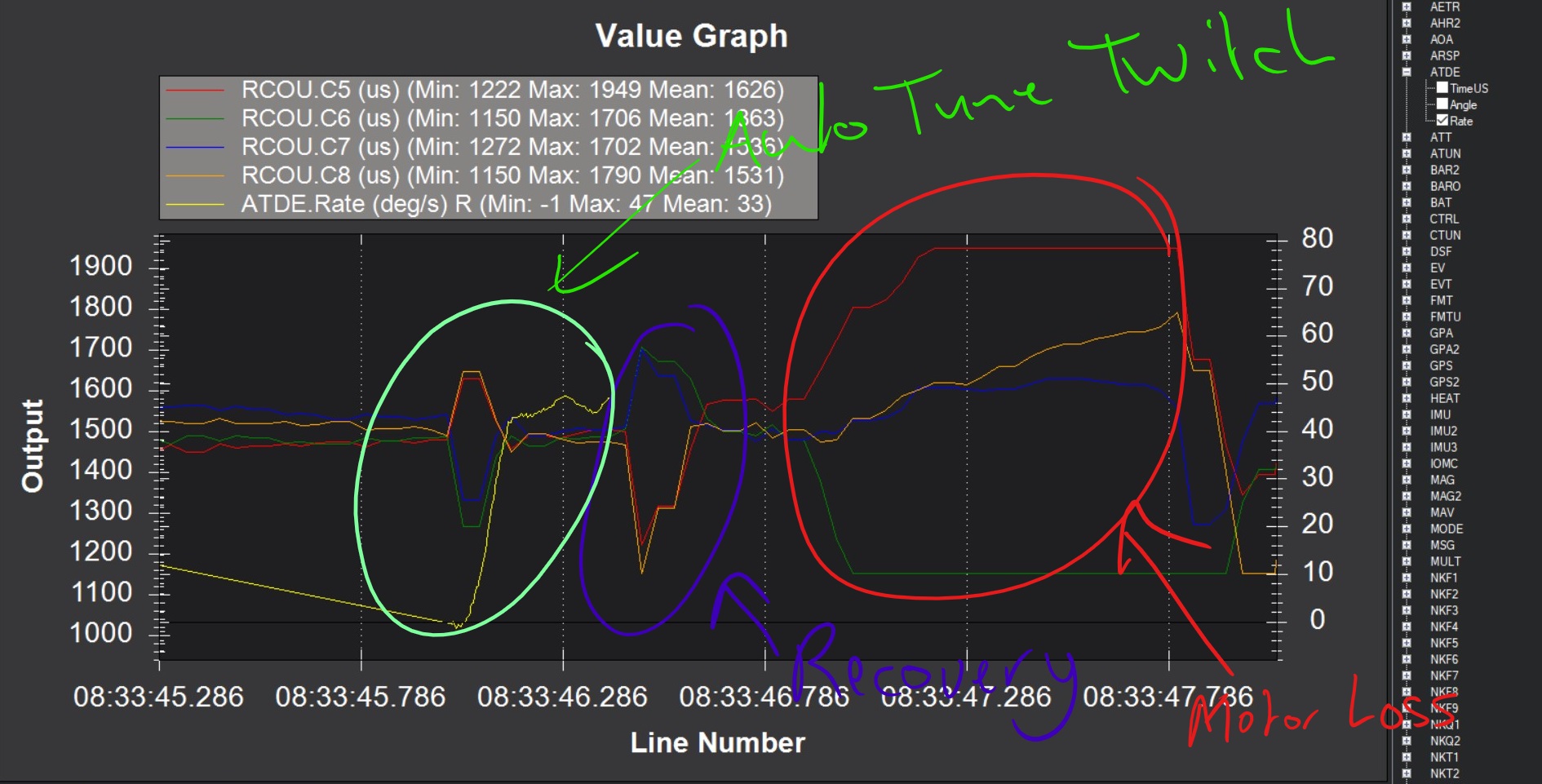
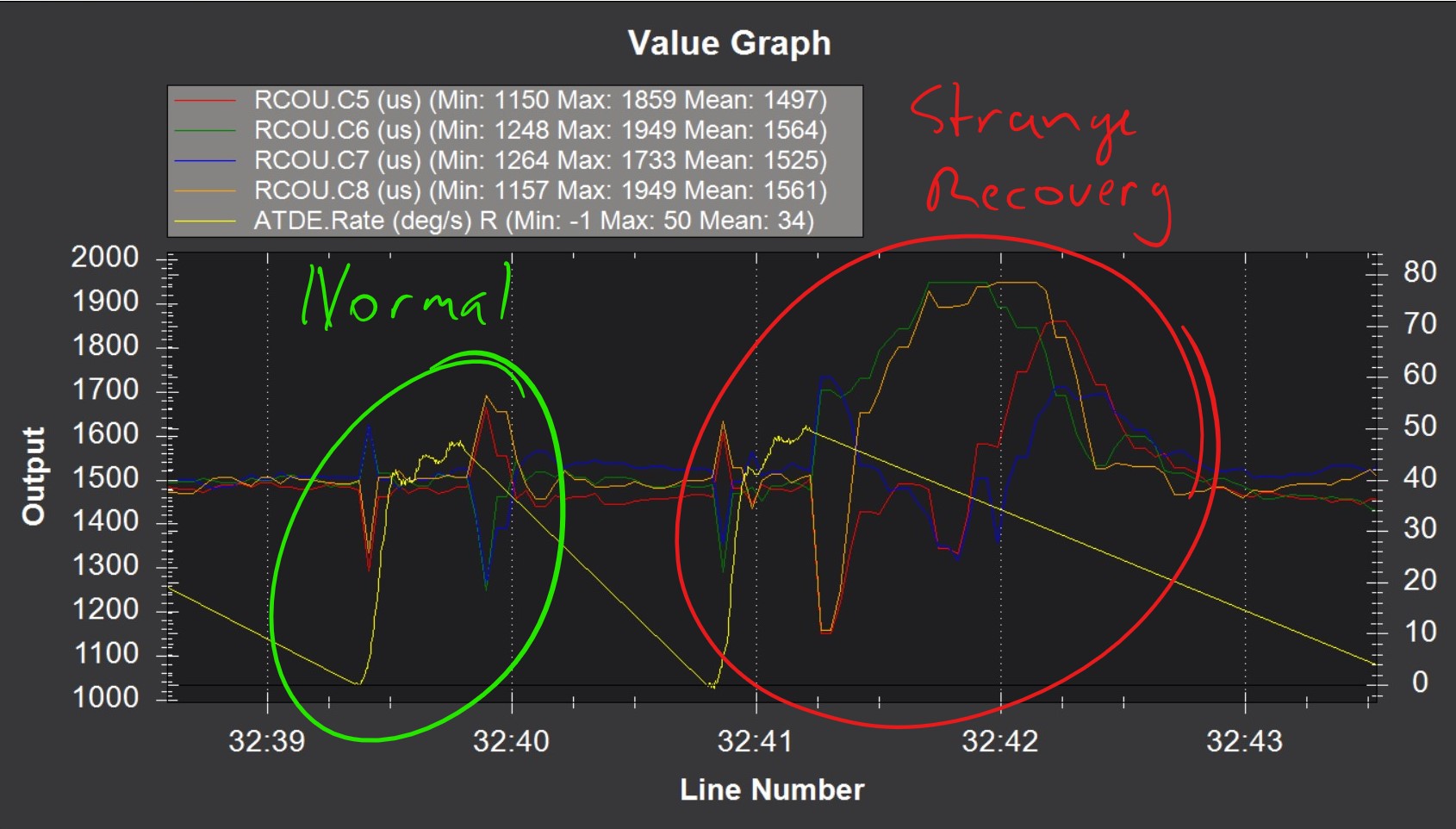
So you recon the PIDs were the main problem? That spike in the graph above is not some sensor failure/reset because of wrong parameters or anything, but it was actually the first normal cycle of autotune? I would like to understand it from the data.
Btw on the Quadplane parameter page https://ardupilot.org/plane/docs/quadplane-parameters.html it says:
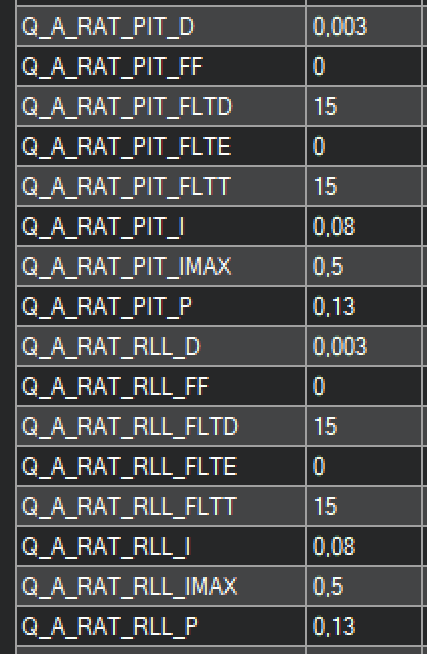
" The most critical tuning parameters are Q_A_RAT_RLL_P and Q_A_RAT_PIT_P. These default to 0.25 but you may find significantly higher values are needed for a QuadPlane."
I think this gave me a completely wrong feeling about those parameters. My initial try was 0.3 based on that and the plane flipped right at the start, thats why I was rather positive how it went this time. Of cause I am just one point of experience, but my VTOL should be a rather average setup. Maybe it should be considered weather the documentation should be updated?