Hello friends I am trying to configure the speed of descent of the quadplane in the first stage, but it seems that there is no such function (LAND_SPEED_HIGH) for quadplanes …
I’m trying to use the following settings:
Q_WP_SPEED_DN 250 cm / s (before it was 150 … I changed it to 250 and it seems that it didn’t change anything, it keeps going down very slowly in the first stage … in fact it seems that there is no difference between the first stage and the final stage of descent !
I don’t know a lot about quadplane so I’m not really able to help. It is very possible that QuadPlane doesn’t implement the two stage land speed feature that is in Copter.
I suspect the Q_LAND_FINAL_ALT is the final altitude that the vehicle will stop at when descending in QLand. So if set to a non-zero value it may not completely land if Q_LAND_FINAL_ALT is non-zero. I’m not sure about this though.
Q_LAND_FINAL_ALT: It is the final altitude (in meters) for changing the descending speed before landing:
Q_LAND_SPEED … Determines the descent speed (in Cm / s) when the aircraft reaches the point defined in Q_LAND_FINAL_ALT
At this point there should be a change of speed to decide to have a smooth and short landing.
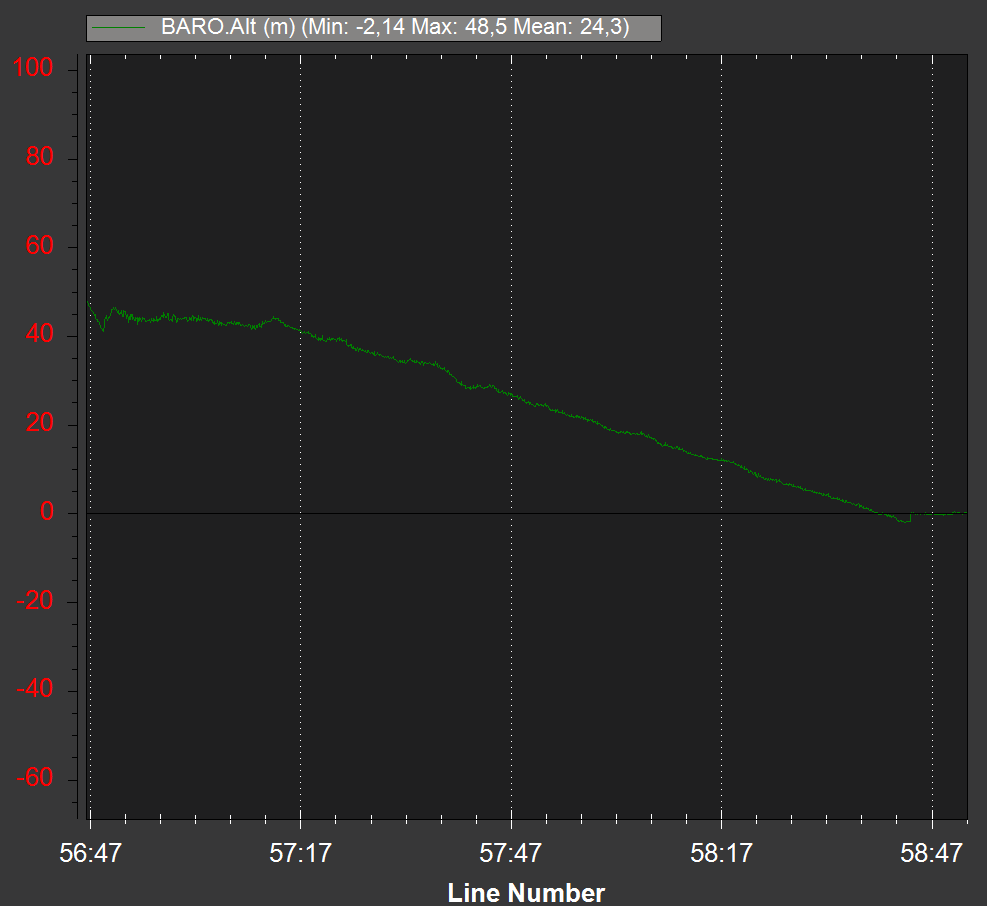
I understand that this speed could be a little higher at the beginning of the descent (around 150 or 200 Cm / s). And slower at the end of the descent (50 Cm / s) … It is precisely this parameter that I am not able to define. The aircraft transitions at a height of 40m and descends the entire route at the same speed of 50Cm / s … this consumes a lot of battery.
I know that in the copter version there is a LAND_SPEED_HIGH parameter that adjusts the first stage of the descent, but in the quadplane version we do not have this parameter. I tried to adjust it by Q_WP_SPEED_DN … but this parameter is to be used on missions, and not on landing … it didn’t work.
I am having this exact same issue. Plane descends at Q_LAND_SPEED independent of whether it is above or below Q_LAND_FINAL_ALT. Anyone had any luck fixing this?
Slightly embarrassing… but for any of those who have a similar issue - this arose from setting the VTOL land WP with an altitude > Q_LAND_FINAL_ALT. This in effect causes the Q_LAND_FINAL_ALT to be set to the altitude specified in the WP so that Q_LAND_SPEED (as opposed to Q_WP_SPEED_DN) is initialised way too early.