Hello:)
I have problem when i try do upload mission to the copter.
wp = mavwp.MAVWPLoader() seq = 1 frame = mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT lat = (53.128015784034675,53.1216660) lon = (23.11616498623093,23.1258) alt = (20,40) N = 2 wp.add(mavutil.mavlink.MAVLink_mission_item_message(master.target_system, master.target_component, seq, frame, mavutil.mavlink.MAV_CMD_NAV_TAKEOFF, 0, 0, 0, radius, 0, 0, lat[0],lon[0],alt[0])) seq+=1 wp.add(mavutil.mavlink.MAVLink_mission_item_message(master.target_system, master.target_component, seq, frame, mavutil.mavlink.MAV_CMD_NAV_WAYPOINT, 0, 0, 0, radius, 0, 0, lat[1], lon[1], alt[1])) seq += 1 wp.add(mavutil.mavlink.MAVLink_mission_item_message(master.target_system, master.target_component, seq, frame, mavutil.mavlink.MAV_CMD_NAV_LAND, 0, 0, 0, radius, 0, 0, lat[1],lon[1],alt[1])) master.waypoint_clear_all_send() master.waypoint_count_send(wp.count()) for i in range(wp.count()): msg = master.recv_match(type=['MISSION_REQUEST'],blocking=True) master.mav.send(wp.wp(msg.seq)) print 'Sending waypoint {0}'.format(msg.seq) mission_ack_msg = master.recv_match(type=['MISSION_ACK'], blocking=True) disp_MISSION_ACK(mission_ack_msg)
But when i upload it, it change first mission to MAV_CMD_NAV_WAYPOINT (as in the image)
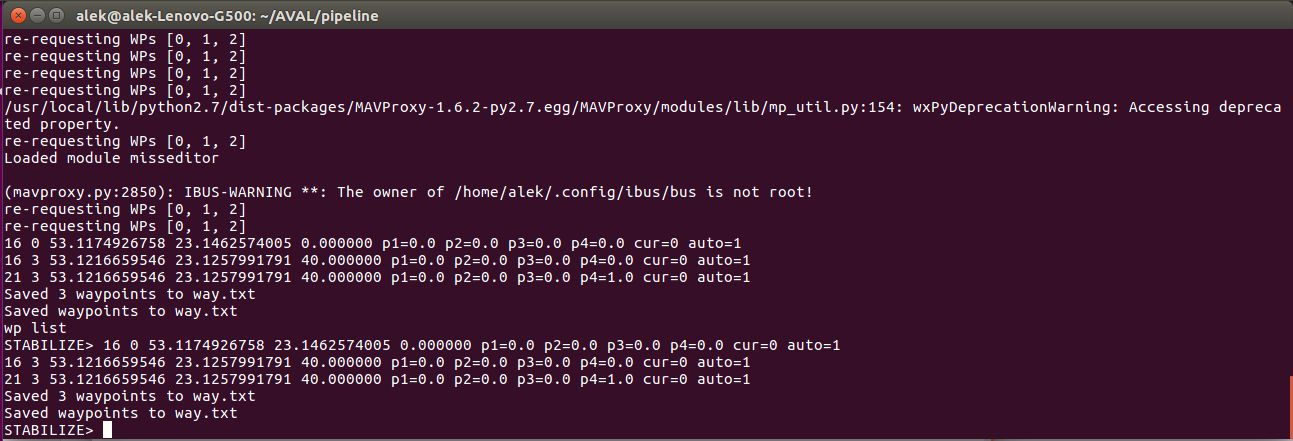
I would like if it is some kind of glitch ? Or maybe first element of mission is special and always shoud be type 16? Maybe i shoud add takeoff as a second misssion item? Anyway i cant takeoff in auto mode. Thanks for any adivise!