I am trying to send custom status text to my SITL application(it is standard simulation basen od sim_vehicle.py)
I am tryging to send simple message from pymavlink to MAVProxy command window.
autopilot.mav.statustext_send(6, 'D06DDDDDDDDDDDDD', force_mavlink1=False)
But it doesn’t do anything. There is no any effect.
So i tried to checkout how that frame looks like when using QGC. When i arm copter in QGC it shows
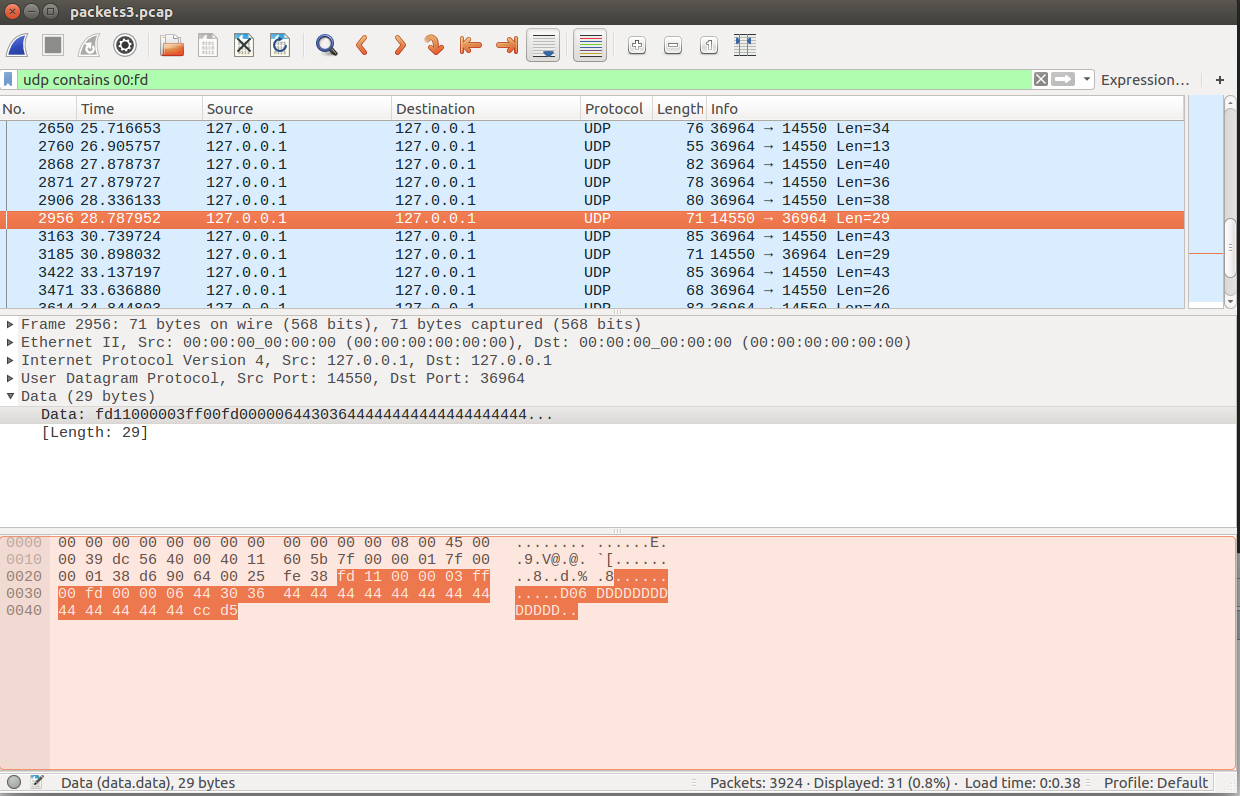
APM: Arming motors in MAVProxy.
I have sniff UDP package using https://askubuntu.com/questions/913393/sniff-udp-packets-on-a-local-port
ARMING MESSAGE
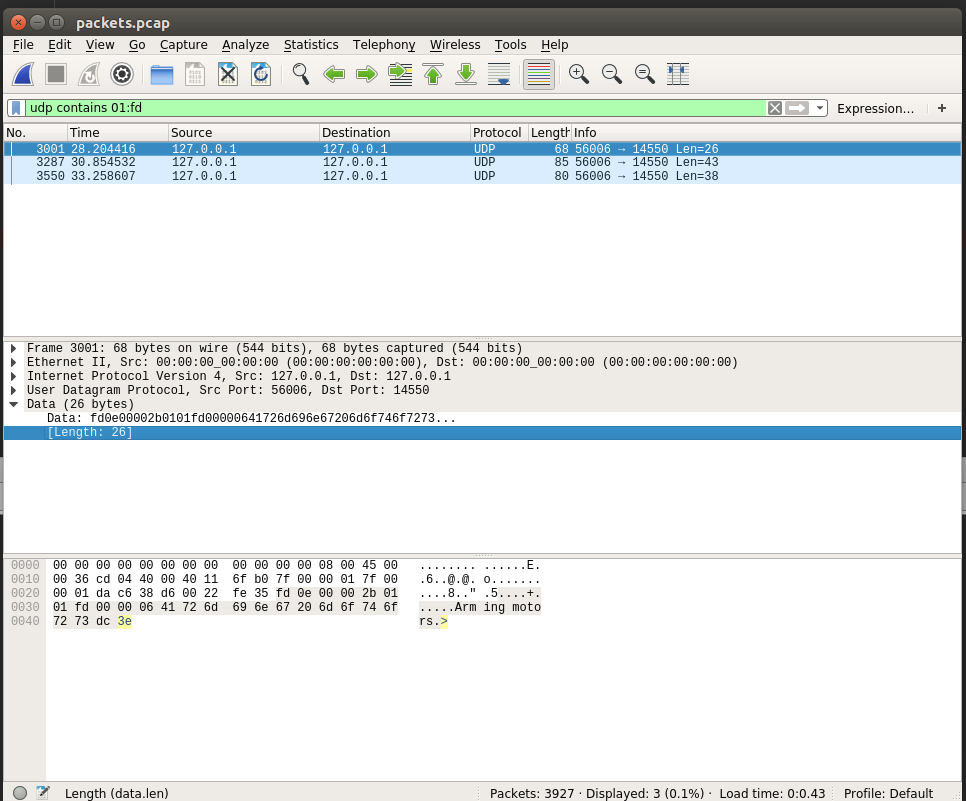
MY MESSAGE
file:///home/aleksander/Pictures/Screenshot%20from%202018-02-06%2013-57-27.png
it looks like, despite of fact no information my text wasn’t show. I can see that(https://mavlink.io/en/protocol/overview.html) my sysid and compid looks different ( 255 0 instead of 1 1 ). So i manually change ardupilotmega class MAVLink_statustext_message. I forced it to to be 1 and 1 .
class MAVLink_statustext_message(MAVLink_message):
'''
Status text message. These messages are printed in yellow in
the COMM console of QGroundControl. WARNING: They consume
quite some bandwidth, so use only for important status and
error messages. If implemented wisely, these messages are
buffered on the MCU and sent only at a limited rate (e.g. 10
Hz).
'''
id = MAVLINK_MSG_ID_STATUSTEXT
name = 'STATUSTEXT'
fieldnames = ['severity', 'text']
ordered_fieldnames = [ 'severity', 'text' ]
format = '<B50s'
native_format = bytearray('<Bc', 'ascii')
orders = [0, 1]
lengths = [1, 1]
array_lengths = [0, 50]
crc_extra = 83
def __init__(self, severity, text):
MAVLink_message.__init__(self, MAVLink_statustext_message.id, MAVLink_statustext_message.name)
self._fieldnames = MAVLink_statustext_message.fieldnames
self.severity = severity
self.text = text
def pack(self, mav, force_mavlink1=False):
mav_copy=mav
mav_copy.srcSystem=1
mav_copy.srcComponent=1
return MAVLink_message.pack(self, mav_copy, 83, struct.pack('<B50s', self.severity, self.text), force_mavlink1=force_mavlink1)
now my message looks like
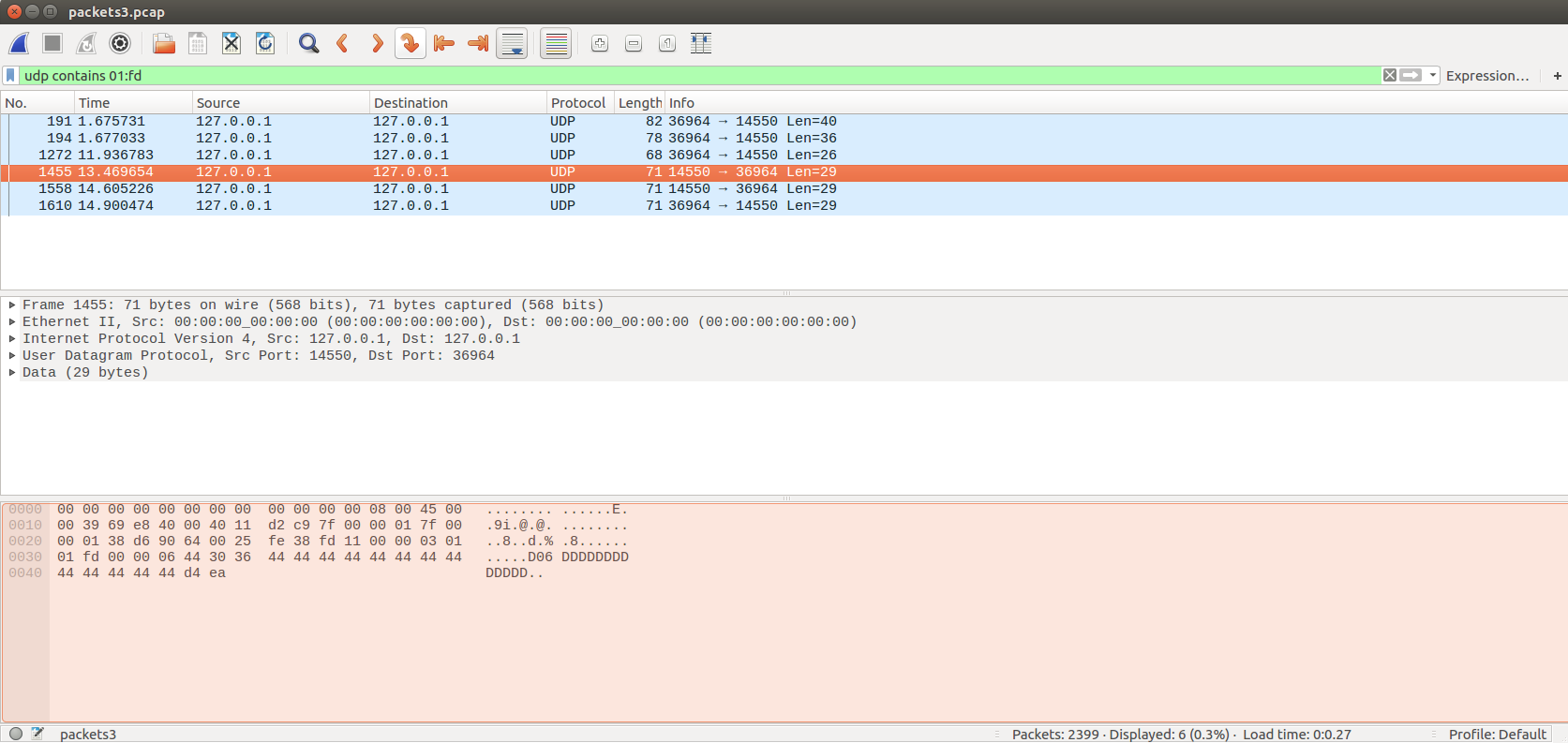
But It doesn’t effect. I would like to ask if i should MAVProxy to printout custom mesasges? Or change something in my code? Maybe i should change variable srcSystem or srcComponent to another? Or there is some mistakes in char encoding?
Thanks for any help