Hi dears,
I configured the Px4flow module following the ardupilot wiki and tested it in loiter mode. The test results were also acceptable and almost stable. My flight controller is pixhawk4 with 4.0.7 copter firmware.
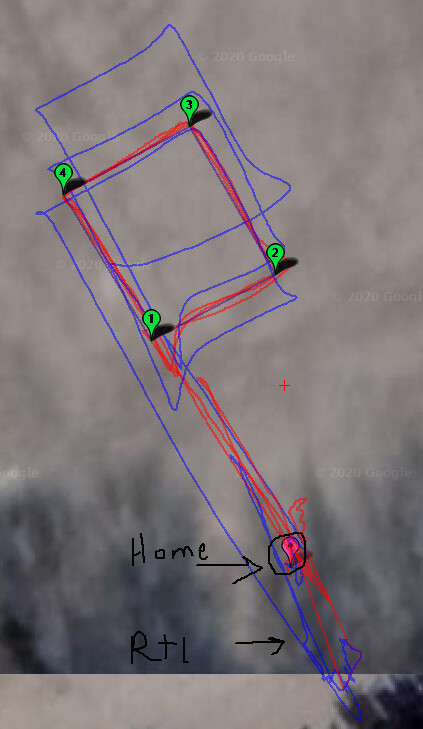
in auto mode with a mission, the vehicle has some additional drift, and strangely it passed the point of the home and did not land (lost it).
- It should be noted that the px4flow calibration was suitable.
- The test ground is asphalt.
Is there a way to improve performance or solve the problem?
Log file :
Upload files for free - Auto Test.BIN - ufile.io
ardupilot wiki:
https://ardupilot.org/copter/docs/common-px4flow-overview.html
https://ardupilot.org/copter/docs/common-optical-flow-sensor-setup.html#common-optical-flow-sensor-setup