shreks7
July 11, 2018, 6:13pm
1
Hi,
I’m trying to setup PX4Flow with BeagleBone Blue. I am running the Arducopter build for BBBlue.
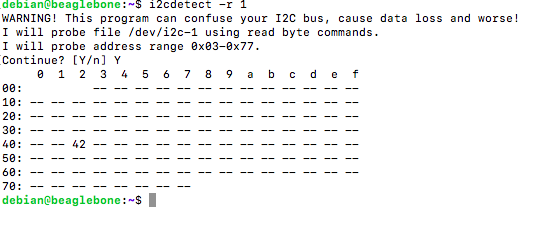
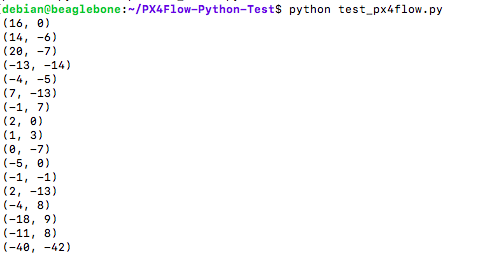
I can detect the sensor using i2cdetect -r 1 and also via the @ppoirier ’s PX4Flow-Python-Test (Github Repo ).
However, I can’t see opt_m_x and opt_m_y changing in Mission Planner.FLOW_ADD to 1 to match the i2c line, but not sure how the mapping works.
The PX4Flow is being powered by the PDB directly.
Thank you
ppoirier
July 11, 2018, 6:59pm
2
The adress should be default (0x42) and the bus is 1 , as defined correctly in linux board
Do you have a rangefinder ? This is necessary in order to get the OpticalFlow working
shreks7
July 11, 2018, 7:13pm
3
Changing the FLOW_ADD to default 0 doesn’t work.
I have a TFMini Range Sensor connected to serial and it works. I can see the range sensor working in Mission Planner but not the PX4Flow.
ppoirier
July 11, 2018, 7:35pm
4
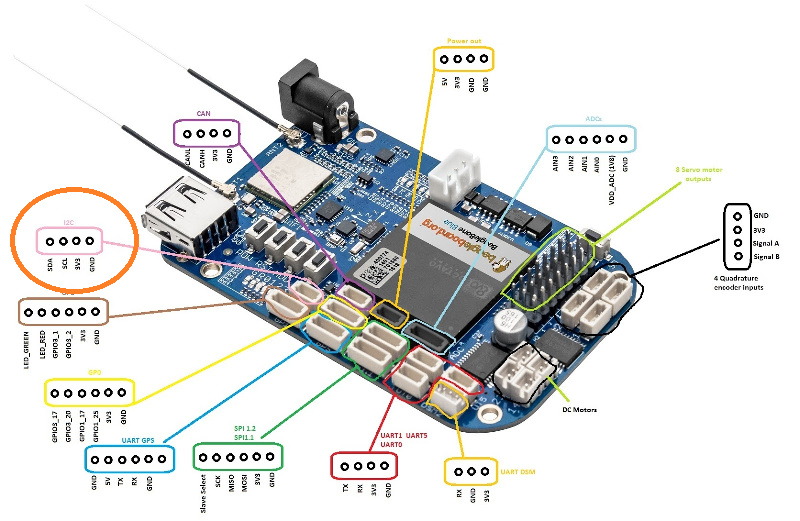
Just to make sure, you use the good connector and pins
shreks7
July 11, 2018, 7:42pm
5
The connectors look okay since the BBBlue can detect the PX4Flow on I2C and your python script is reading the values.
https://discuss.ardupilot.org/uploads/default/original/3X/2/9/29ddbe125651dee1b95bc51198861162a80b9b60.png
I have a feeling the mapping from BBBlue I2C-1 is not same as HAL_OPTFLOW_PX4FLOW_I2C_BUS 1
What do you think?
ppoirier
July 11, 2018, 7:45pm
6
Yeah , thats right the test works…
1 Like
shreks7
July 14, 2018, 4:33pm
7
Any luck with PX4FLow with BeagleBone Blue?
I found this for BBBlack -
I2C0: used for some on-board components (HDMI, EEPROM, power mgmt). Not brought out to any connector/header
I2C1: entirely free to use, but doesn't seem to be enabled
I2C2: entirely free to use, and works
NOTE: In software, the busses are numbered differently; I2C2 is identified as 1. I2C0 is identified as 0.
Do you think this is the case with BBBlue too? Maybe the I2C-1 is identified as 2.
ppoirier
July 14, 2018, 6:58pm
8
The exposed I2C is BUS 1, but it seems that it cannot map within ardupilot even if the definitions is good. Looks like a Bug, I will dig deeper.
ppoirier
July 15, 2018, 2:23pm
9
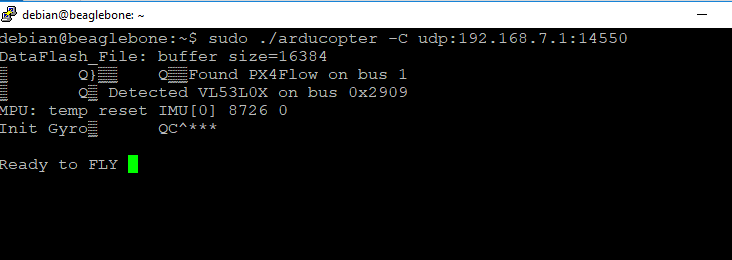
OK I just builded a Blue from master, and it works
This is release ArduCopter V3.6-dev (13b56d58)
1 Like
shreks7
July 17, 2018, 6:46pm
10
ppoirier:
ArduCopter V3.6-dev
I compiled Blue from Copter-3.6 branch and I can confirm it works. Thank you for the help.