limzw
(limzw)
1
Hello,
What is the relationship between RCIN and RCOUT?
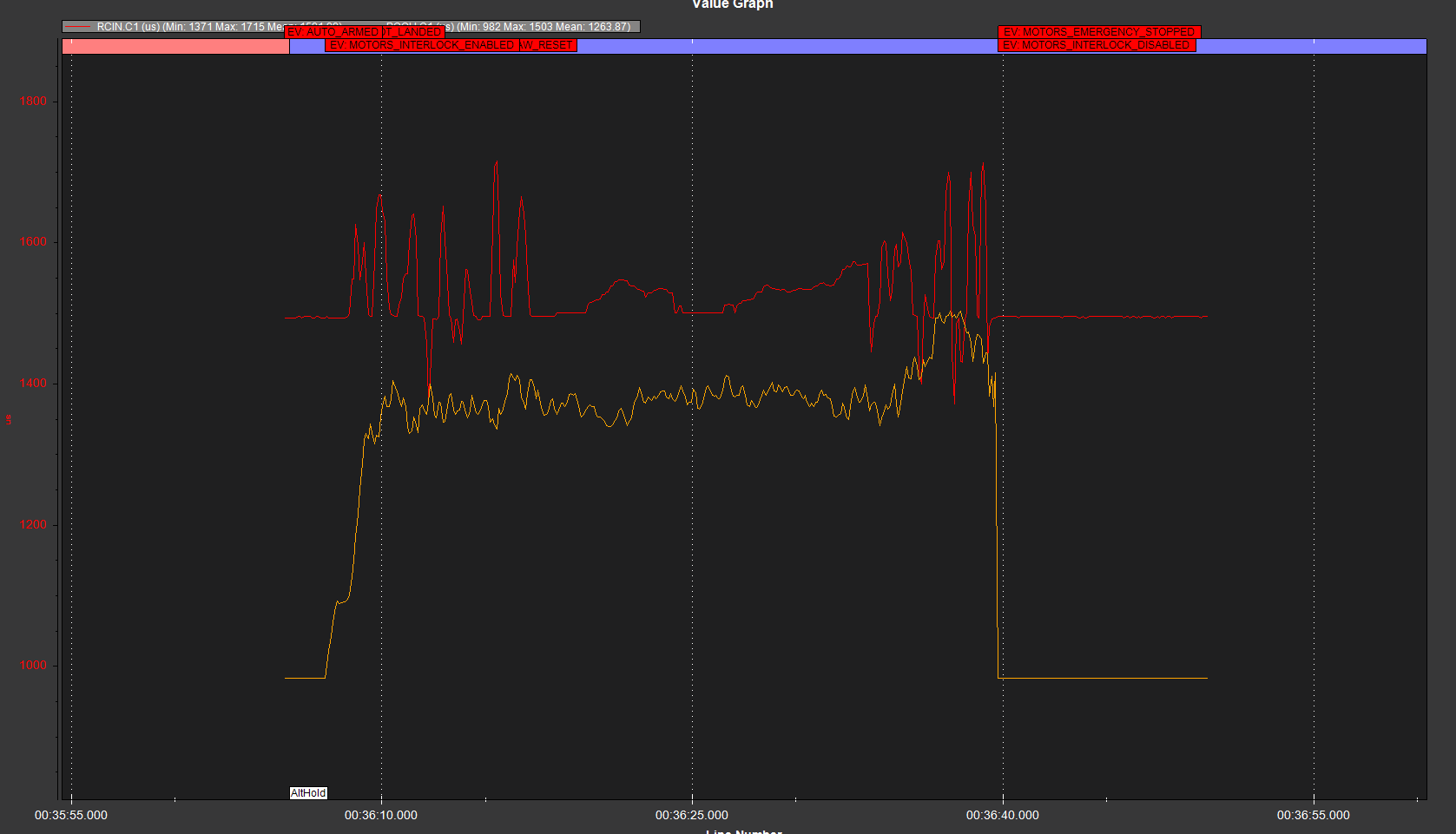
I’ve tried to compare the RCIN and RCOUT values for CH1 from the .bin file but i can’t quite figure out how they are related with one another.
Below is the graph that i was looking at.
00000474.BIN (708 KB)
I’ve attached my .bin file for any one who would like to look at it.
mlebret
(mlebret)
2
There is no relation.
RC In is a pilot order (roll, pitch, yaw, climb)
RC Out is the computed signal sent to each motor (RC Out 1 to X) to follow the order.
limzw
(limzw)
3
Ok,
But generally if i were to increase my RCIN pwm value, should the RCOUT also increase?
I am also not very familiar with how much pwm value an ESC needs, but is it normal to see values of approximately 1400?
Thank you
mlebret
(mlebret)
4
At 1400 to maintain hover, you are on the good side. Around 1300, you are limit to over powered.
Read the wiki…
RC In 3 (in most cases) control Power. RC out for all motors will follow RC In 3 like when you climb or increase ground speed.
limzw
(limzw)
5
Ok,
Can i trouble you for the wiki link please?
mlebret
(mlebret)
6