Hey Guys,
I have my pixhawk4 and two BLDC motors, ESCs and the PM07 board setup in a benchtop setting. I am currently using a joystick for this application. I have Servo1_Function and Servo3_Function setup as 74 and 73 respectively.
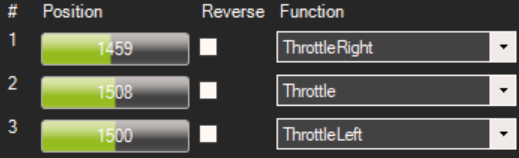
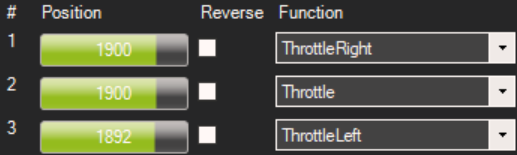
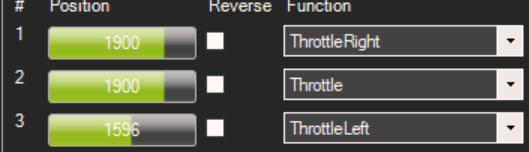
I currently have Servo1 and Servo3 trim set at 1100 because when I don’t the motors will spin continuously (so I am armed and both motors are not spinning) . When I move the throttle to be fully on, both CH1 and CH3 respond but the PWM does not change enough to actually power the motors.
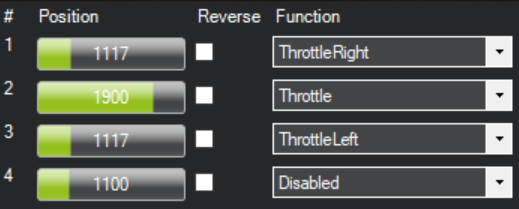
This range is the same whether or not I have the trim value set at 1100 or 1500 for each motor.
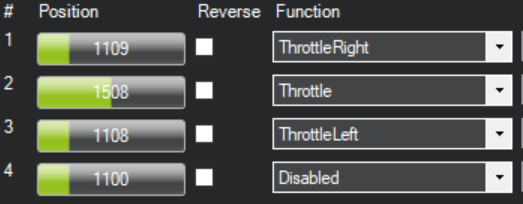
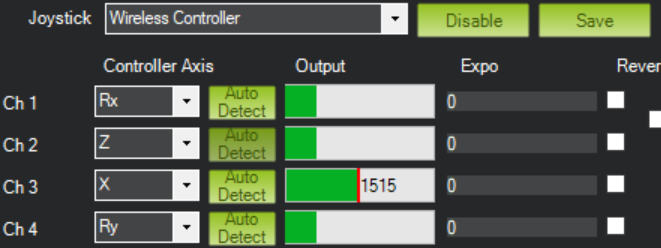
Here is how my joystick is setup for reference.
I would greatly appreciate any help on this. I have tried changing the KFF_RDDRMIX and RDDR_DT_Gain parameters but that does not help with this.