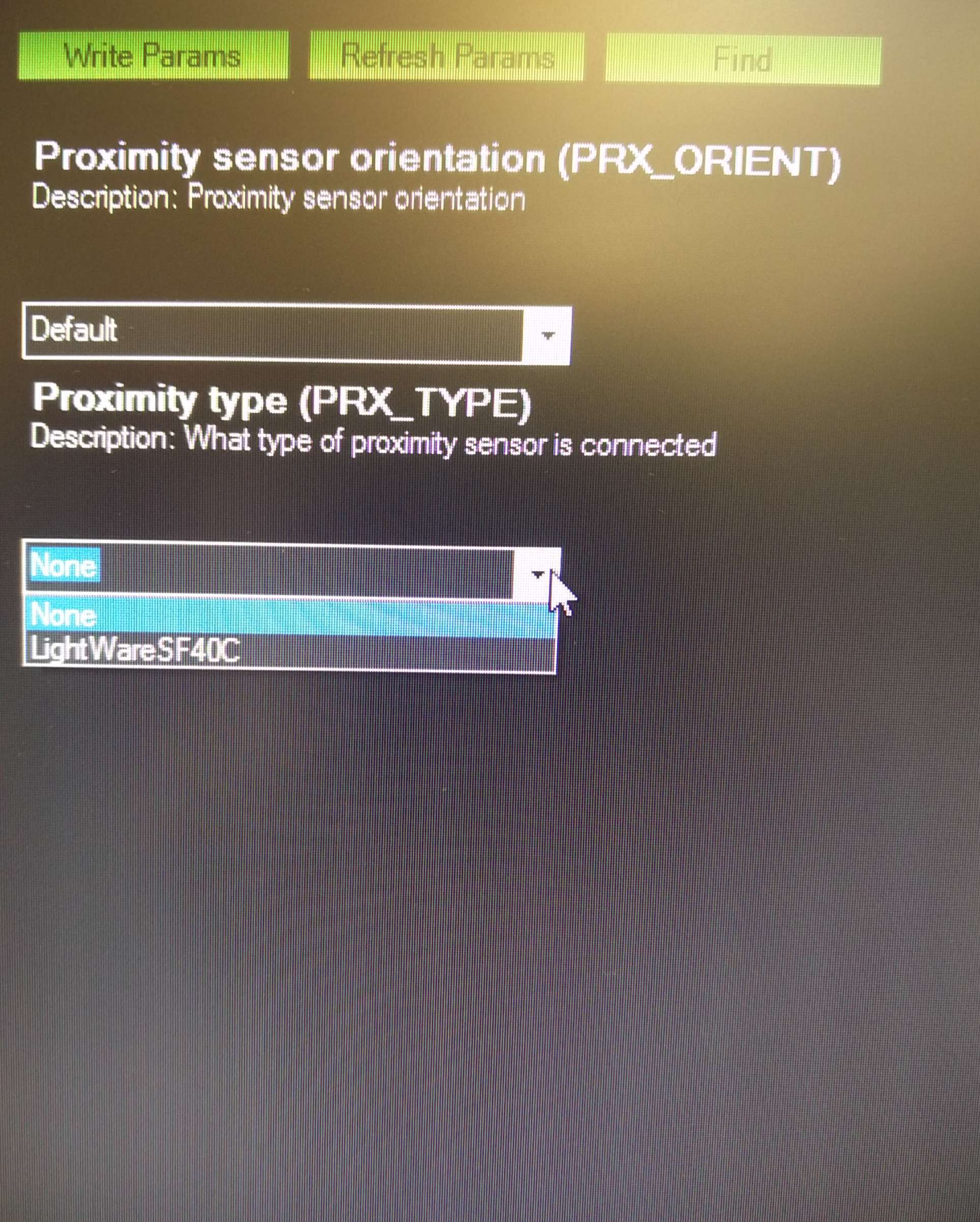
Im trying to implement obstacle avoidance on a quadcopter I am building (using Pixhawk and Arducopter). Im trying to do obstacle avoidance with 8 horizontal Maxbotix LV EZ0 sensors covering 360 degrees. The distances are sent to the Pixhawk via an arduino using mavlink, and Im guessing that I have to set PRX_TYPE to Mavlink for that to work. However, as shown in the picture below, there only seem to be 2 options. How can I get this to work? (Thanks in advance)
So, I managed to change it to Mavlink using APM Planner, but dont seem to get that option in Mission Planner. @Michael_Oborne maybe this is something that could be changed?
But for some reason, I am just not being able to “activate” obstacle avoidance on the quadcopter. I am under the impression that if I take off in stabilize mode, then there will not in any obstacle avoidance, but as soon as I switch to Alt-Hold mode, it should be activated. However, the quadcopter doesn’t seem to really move away from obstacles when brought close to them, and CDist in the logs seems to be ~0.20m even though Im guessing that it shouldnt go under 2m.
Any thoughts on why obstacle avoidance may not be starting for me?? Ive attached the log file of one of my flights if it helps 17-04-21_21-58-48.bin (330.2 KB)