I have a problem with the proximity sensor configuration via Mavlink Message on my drone. I am using mission planner as a ground controler.
I send Mavlink messages from my drone with DISTANCE_SENSOR message (System ID = 1 and component ID = MAV_COMP_ID_PATHPLANNER (195)).
I have configured AVOID_ENABLE to All and PRX_TYPE to Mavlink on the drone.
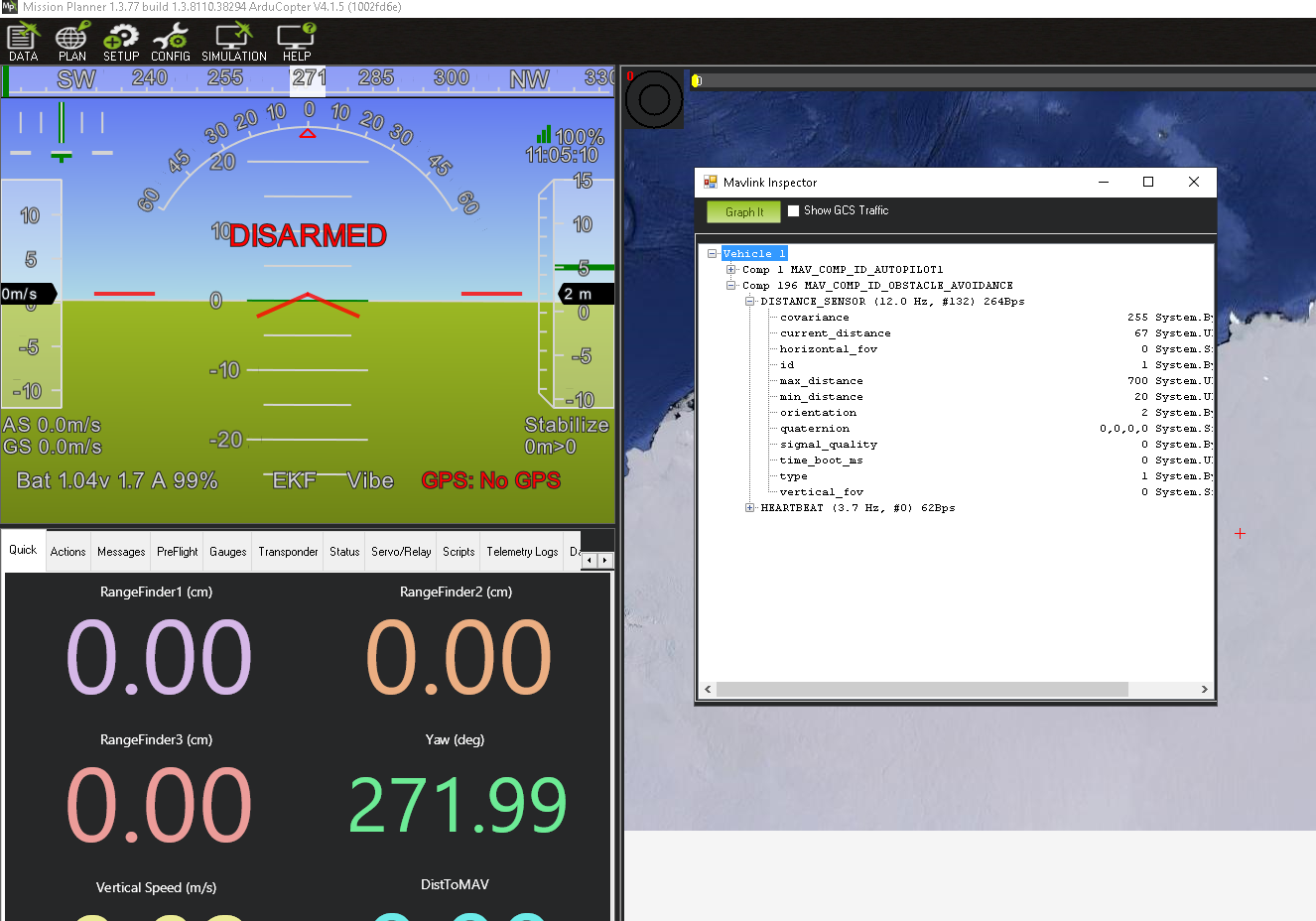
I get the attached image. In the mavlink inspector everything seems to work, I do receive the messages in the mission planner but on the other hand in the proximity viewer nothing is displayed. I had already used this method on an old project and it was working fine.
mission planner is expecting the message to be originating from the autopilot, not a component.
if your component sent out a heartbeat, MP would show it as a separate element in the drop down list in the top right, and then could show the proximity screen for that sysid/compid element.
Bom dia, estou com a mensagem problema no LIDAR aparecendo no mission planner
Poderiam me ajudar a configurar o sensor NRA15 MMW.
Atualmente está configurado no mission planner como sensor 11- uLanding, alguém sabe me informar se está correto?
I have a companion computer (rpi zero with three maxbotix i2c sensors connected to it and I am using pymavlink) that is connected to my CubeBlack via UART running the latest stable V4.1.5 version
the companion computer is sending DISTANCE_SENSOR Mavlink messages to the CubeBlack and its being displayed on mission planner via the Mavlink Inspector
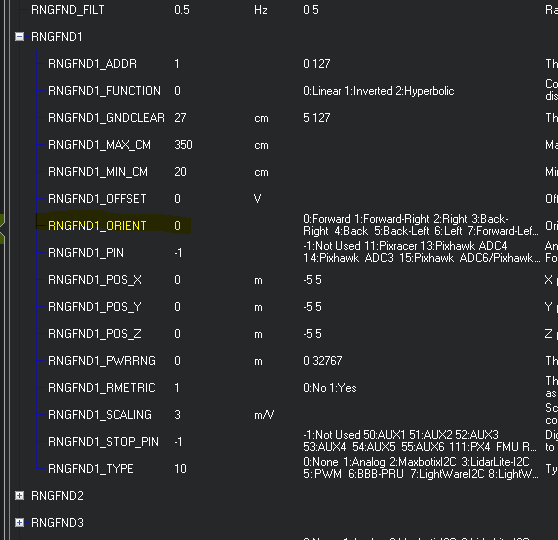
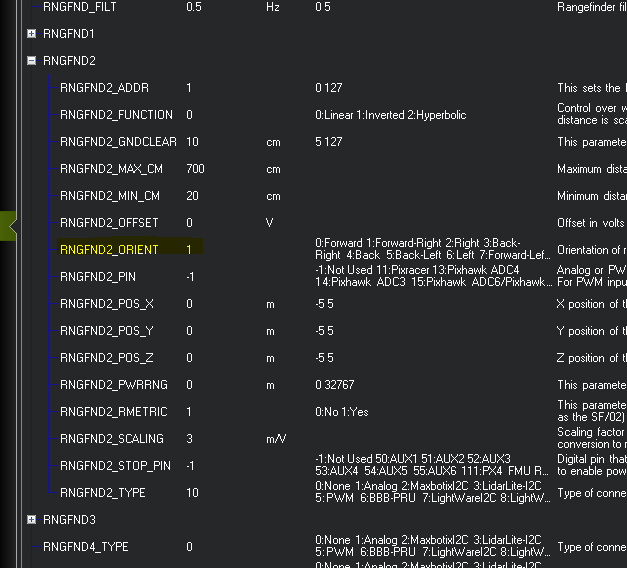
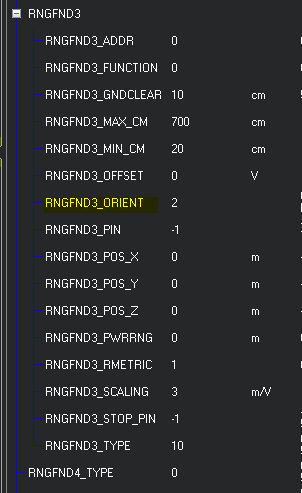
However, from doing trial and error by changing the orientation to 25 specifically I get the DISTANCE_SENSOR message through and it reads for all three range finders. …
I have also signed the mavlink message that I am sending, Sending a heartbeat and changing the component id and system id. - not luck there…
However, When I run the current master, which is at V4.2.X it all works fine