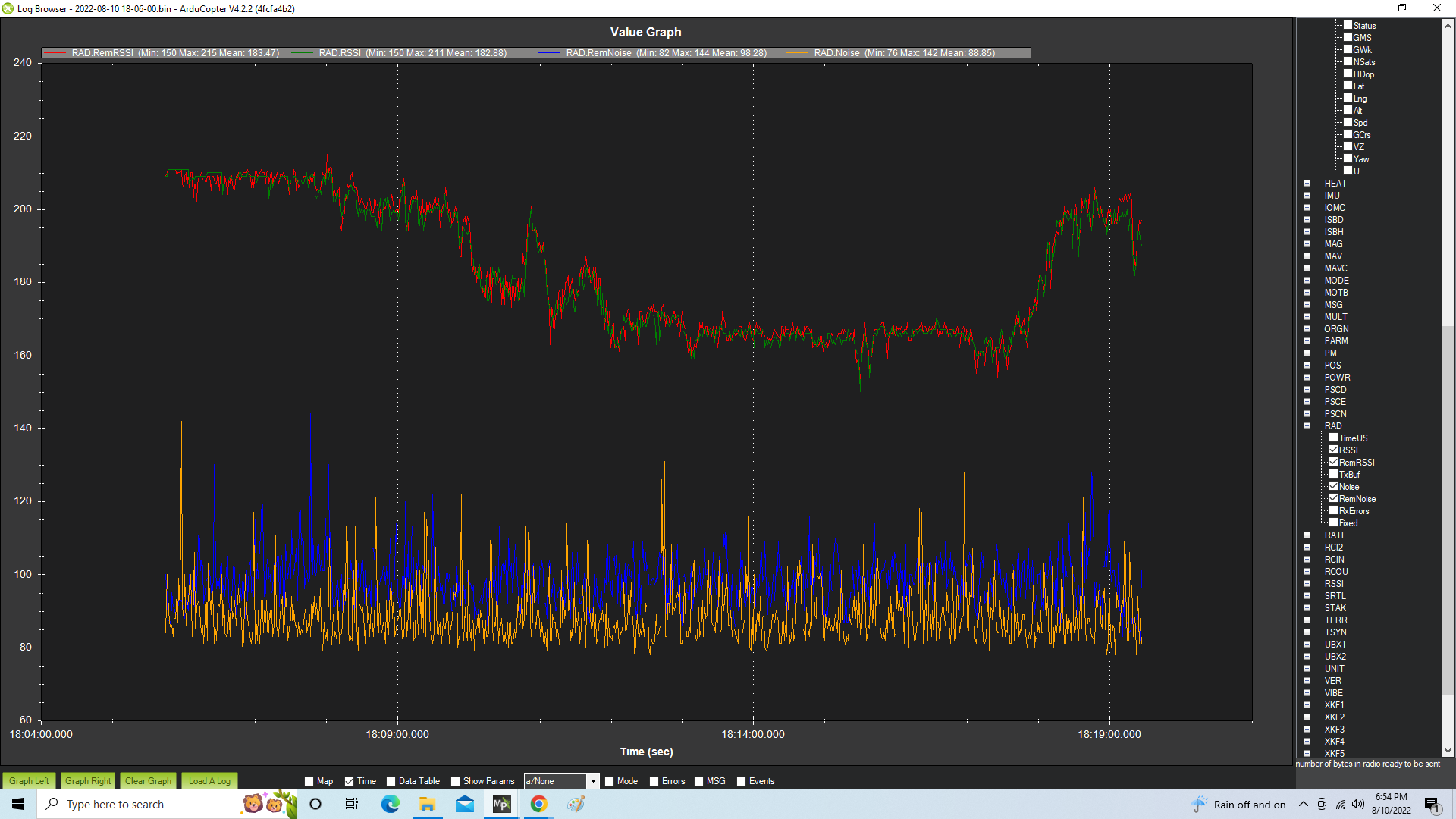
After sorting out my telemetry radio setup for RTK operation, I’m confident that I’m delivering RTK corrections well to my copter.
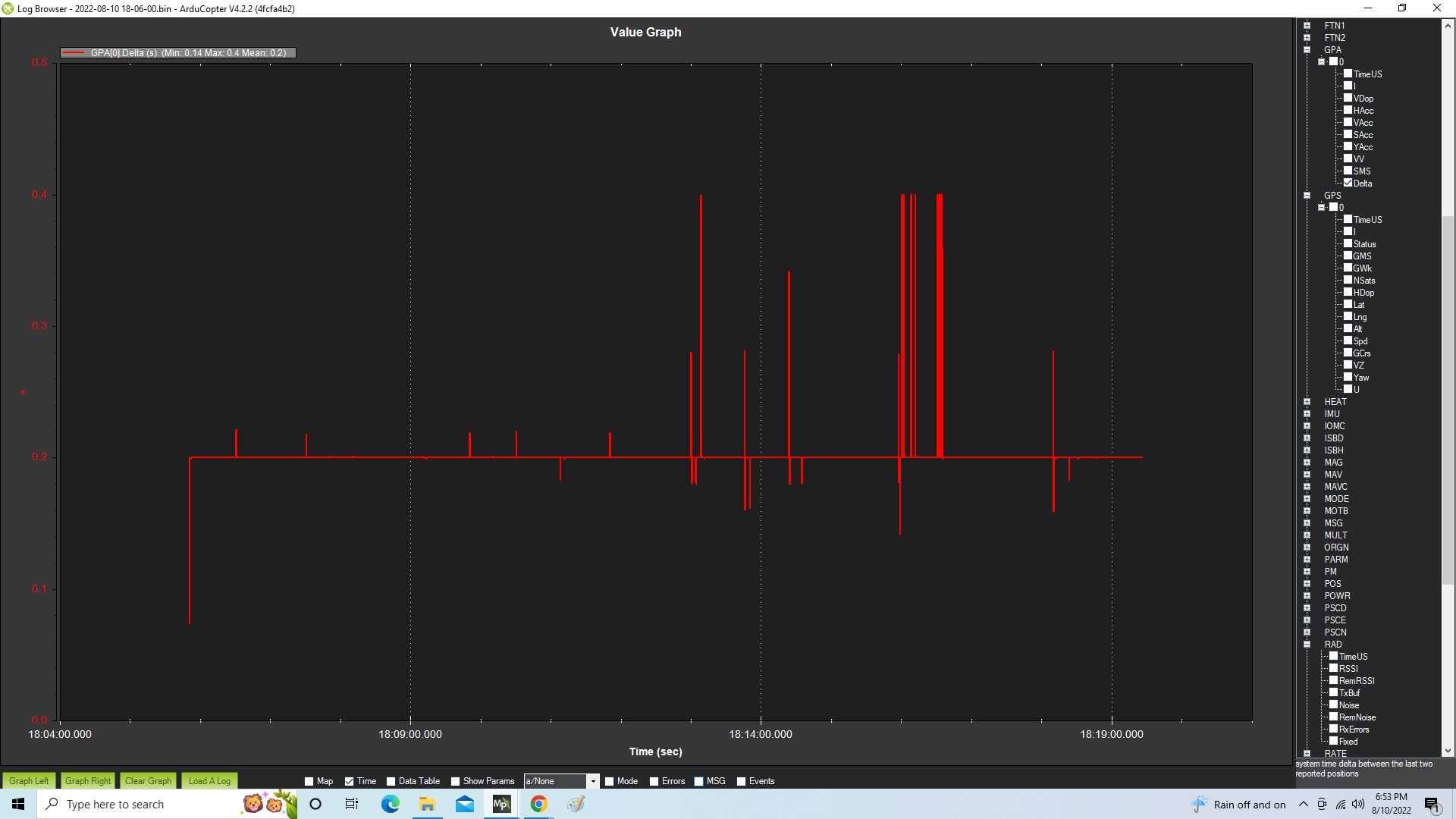
I still get a few “Bad GPS Health” messages - which I’ve learned are the result of not receiving GPS message at at least 5HZ. (200ms)
I’ve learned quite a bit from past threads on this topic, such as this one:
I knew ArduPilot sent parameters to the GPS receiver but I didn’t realize that they are user configurable with the GPS.xxx parameters.
My GPS_RATE_MS is set to 200ms, which is the default - 5HZ. The next faster rate I can set is 125ms which is 8HZ.
There is a caution in these past forum threads that going faster than 5HZ can cause other problems - and actually hurt performance. But the threads on these topics are a couple of years old.
I’d be interested in knowing what the current strategy is on ensuring that there’s no occurrence of “BAD GPS HEALTH” - which EKF issues when there’s greater than 200ms between messages from the GPS.
I’ve uploaded the log from the flight that generated the attached charts. I don’t know if I have all the parameters set properly, but I gave them cursory look. For example, I have the gps type set to UBLOX, not NMEA. That’s supposed to help according to the past threads on this subject.
Thanks for any advice or suggestions!
https://www.dropbox.com/s/e8gjy3wl290ah00/2022-08-10%2018-06-00.bin?dl=0