This is the latest revision of the Companion Computer Architecture.
After some more discussion regarding the overall structure, we thought it would be a good idea to incorporate the various parts of the the complete system typically used in flying a UAV.
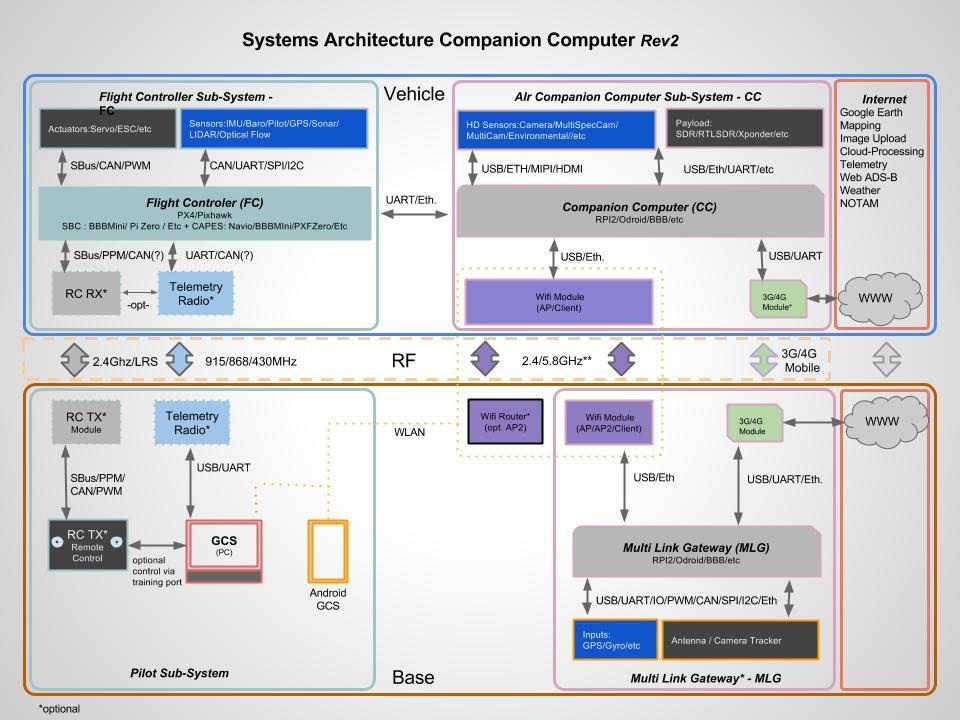
Please note that some of the items are optional or redundant and can be left out as indicated by a . Ideally the RF link comprises of only one link, most likely over wifi, however for redundancy and compliance purposes other connections are shown.
This is composed of 4 main building blocks:
FC: Flight Control - This sub-system includes the RTOS based autopilot, telemetry radio, RC receiver* and peripherals
CC : Companion Computer - This sub-system includes higher level Linux based CPU and peripherals
GCS: Ground Control Station - This sub system is the user interface for UAV control - This typically includes PC/Linux/iOS and Android based platforms that can communicate via telemetry radio, wifi or LTE/3G/4G
MLG: Multi Link Gateway - This is an optional system for use on the ground to provide connectivity with the CC and FC. It can also be used as a local AP, media store and antenna tracker etc.
The FC is connected as follows:
via RC receiver* to the remote control
via Telemetry* radio to the GCS
via UART or Ethernet to the CC
via FC IO to peripherals like ESC, servos etc.
The CC is connected as follows:
via WLAN to the GCS and/or MLG
via LTE/3G/4G* modem to the GCS and/or MLG
via UART or Ethernet to the FC
via CC IO to HD peripherals, like USB or CSI camera etc
The GCS is connected as follows:
via telemetry* radio from the FC
via MLG WLAN or MLG AP or direct from the CC AP
via MLG or direct LTE/3G/4G* through the internet or PtP
control of tracking unit on the MLG*
various peripherals like joystick, VR goggles etc