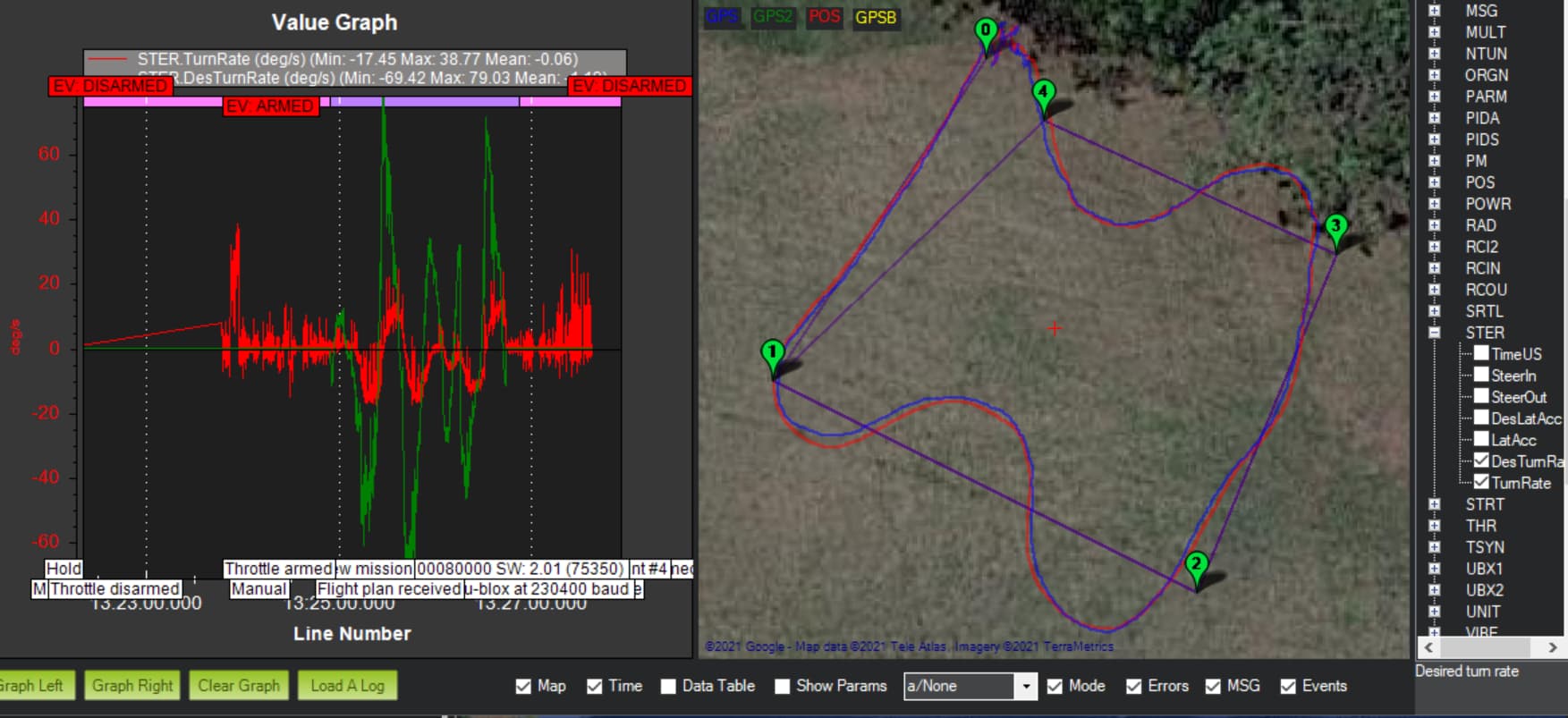
Hi everyone, I’ve finally got ArduRover up and running on the Explora but I’m having some trouble getting around corners. Does anyone have any idea why the autopilot is making these massive overcorrections after turning?
Flight log: https://drive.google.com/file/d/1YDMmv0nFBMZv5665ol2RP_GkZ1vE-m8X/view?usp=sharing