
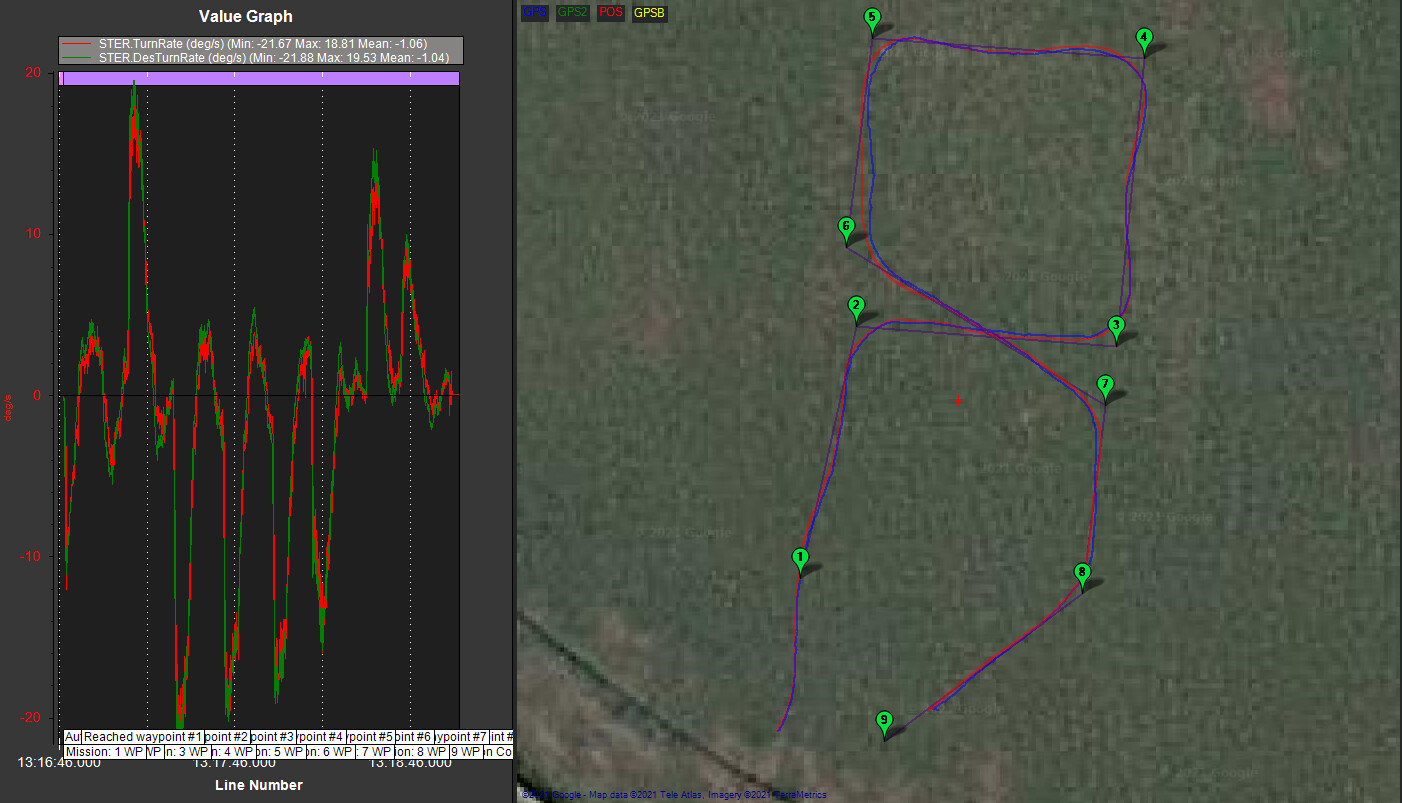
Hi everyone, I’ve finally got ArduRover up and running on the Explora with some good results. The autopilot can probably do with a bit more fine tuning to try and improve the straight line steering wobble but otherwise I’m pretty happy with it at the moment. If anyone knows any tips to help with this it would be much appreciated. Flight Log: https://drive.google.com/file/d/1U3l5VDCSp7gm0hC8Av3UwgP2Ewq-i3Ua/view?usp=sharing
Now that the rover can drive itself, the next step is to set up non-GPS navigation with a tracking camera and MAVLink commands (like attitude targets) sent from the companion computer. Hopefully not long after that I will have my RL algorithm able to set the targets and I can begin training.