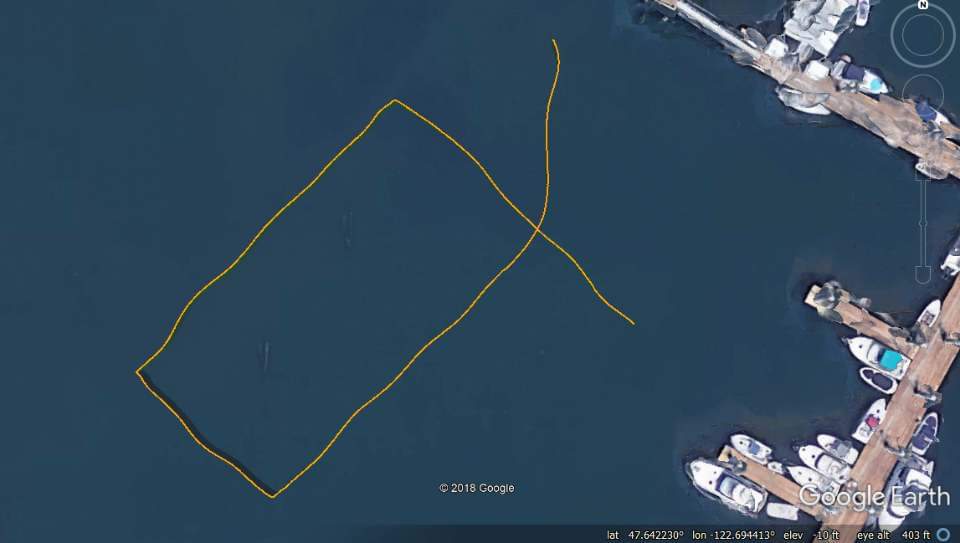
Finally got my arduboat on the water today for the first time and noticed some weird behavior, for lack of a better term it was “drunk”. Kept overshooting the tartget path and way points. Logs attached any help would be awesome!
1 Like
Where is the log? Sounds like just steering PID’s and the L1’s.
I’m having a bit of a problem with your log but it seems des steering and steering are way off as expected. If you could post a parameter file I might have some input. For some reason I can’t see some of you logging or I get errors.
Yes, I agree with @David_Boulanger that the turn rate tuning is way off. There’s a wiki page here (including a video) which describes how the tuning should be done.
In particular the ATC_STR_RAT_FF should probably be increased from the default 0.2 to something like 1.2 or perhaps even higher.
1 Like
some stabilisation fins mounted on the hull of the boat do work wonders. Do you have a picture of your boat?
I finally figured out how to filter PARM’s out of a .BIN log. This looks like a twin screw differential type set up. What I would try is… First put your NAVL1’s back to default. Then up the ATC_STR_RAT_FF to 1. On my boat I also have my ATC_STR_RATE_P and I at .5. It seems to me not to mess with the NAVL1’s until the boat is fairly well dialed in with the ATC_STR_RAT’s and then fine tune it with the NAVL1_PERIOD. This is how I have done it and it has worked out well.
2 Likes
Yes, I totally agree with David that it’s important to get the turn rate control working well before moving onto the higher level navigation tuning.
Awesome thanks for the input, hopefully I’ll be testing again this weekend.
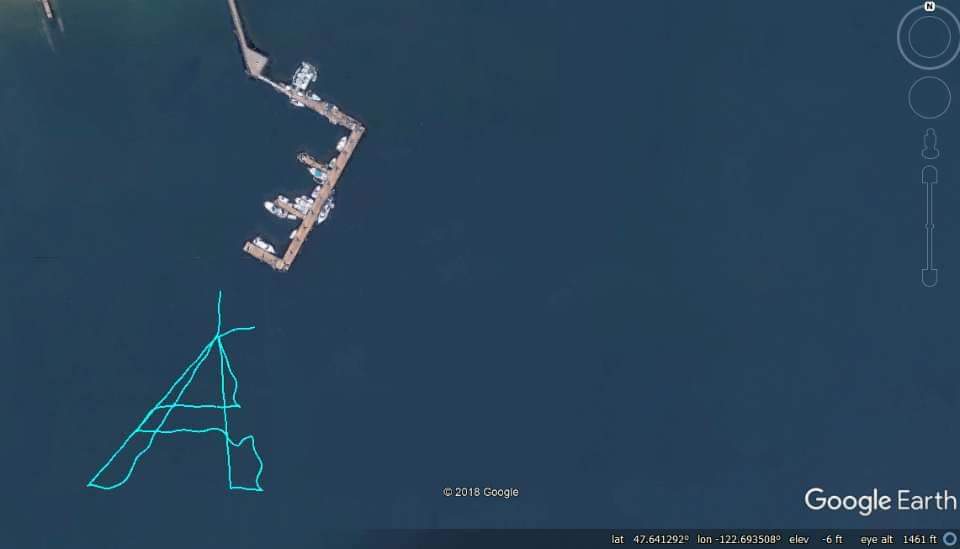
Amazing Pacific Northwest weather in November pet me gain another test day today and you guys were right! Adjusted PIDs as you suggested and she’s driving a ton better. Still a couple of wierd hiccups I need to chase down but we’re getting there!
1 Like
Logs from Sunday’s test i have a wobble in my mast only in auto mode/ RTL i think the motors are “jockeying” to maintain a steady course any insights on fixing this?
https://drive.google.com/open?id=1FWAdZlXJbvhPwpTtGbcBle0iLcAPk1xM
https://drive.google.com/open?id=1Q3a-sz-Ux_DhRsNvb_OtRl0yiR4nDGeN
https://drive.google.com/open?id=12HMXWlTH4-qLz61TpswMTzVtUNNLozKw
video of the new problem:
I think your boat may be underpowered. Your asking it to travel at 2.5 or 3 M/S and at full throttle it will only go about 1. This looks to be causing the throttle out to be maxed out and rapidly pulsing to maintain your heading. I would try changing CRUISE_THROTTLE to 50 percent and set CRUISE_SPEED at .75 and see if the logs look better. I think your asking the boat to do something it is not capable of with its current propulsion system.
1 Like