Hey all,
We’re running a VTOL electric aircraft and having some issues. I believe the FW is 4.3.3 or 4.3.7 but I’ll have to double check it. Typically we use 4.3.x so I just posted it in here to get something on the board.
Firstly, I grabbed our .bin files off of the plane but I may have needed to grab Tlogs, if anyone can clarify that I would appreciate it.
The issues: Our aircraft is having a failsafe warning on takeoff, it doesn’t say what failsafe but we still have manual RC control. I was trying to look through these logs to see if it would tell me what the FS was but I don’t see it anywhere.
Also, when transitioning into QLAND mode, the plane is oscillating HORRIBLY… Like wobbling on all 4 motor axis to the point that it looks like it’s about to flip upside down and crash to the ground. Changing back into QSTABILIZE seems to fix that issue but then the plane drifts as we are attempting to land.
The plane seems to be CG’d correctly, we hung it from the CG hooks and it was just ever so slightly nose heavy with the battery placement.
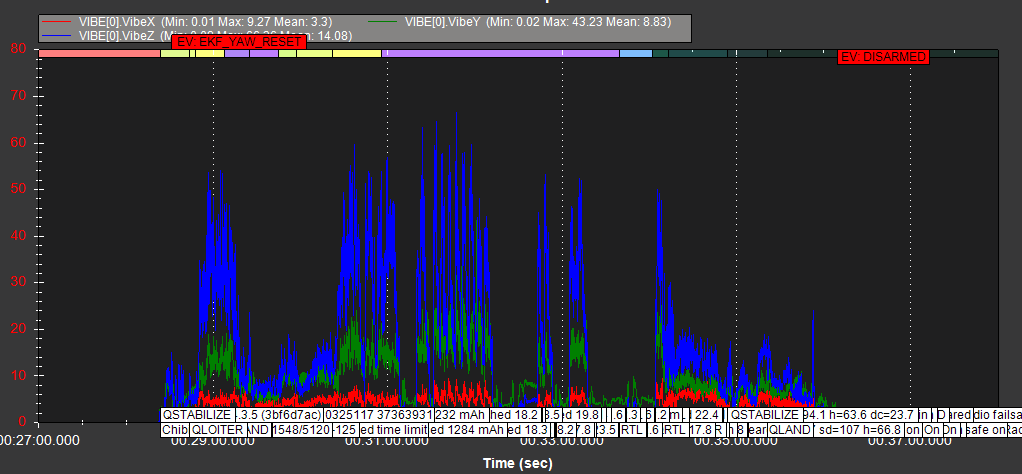
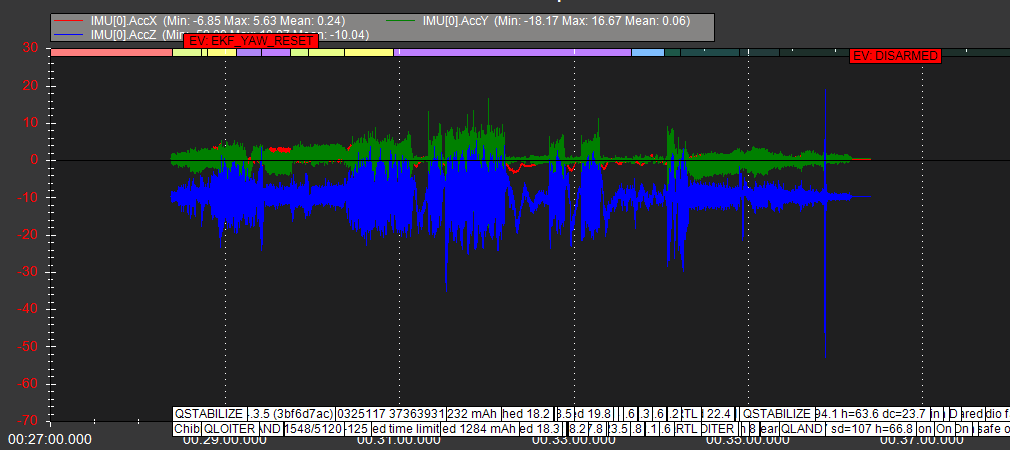
I’m almost wondering if the auto pilot is seeing a lot of vibration, the plane visibly shakes and shudders a lot, I assume it’s either vibration from the body or maybe the stock PID’s are too high. With the way it oscillates in Qland I’d be afraid to put it into an auto tune… but it might be fine because it seems to hover alright in QLOITER mode.
Any input on this issue? I’m wondering if anyone else is having a failsafe bug on takeoff…We thought maybe it was an RC failsafe but we swapped out the Futaba receiever we are using and put in a TBS Crossfire and still got the same issue. Failsafe warning but still maintained C2 control.
I’ll post a link to the bin logs on dropbox, if I need to go back and grab Tlogs or whatever else please let me know.
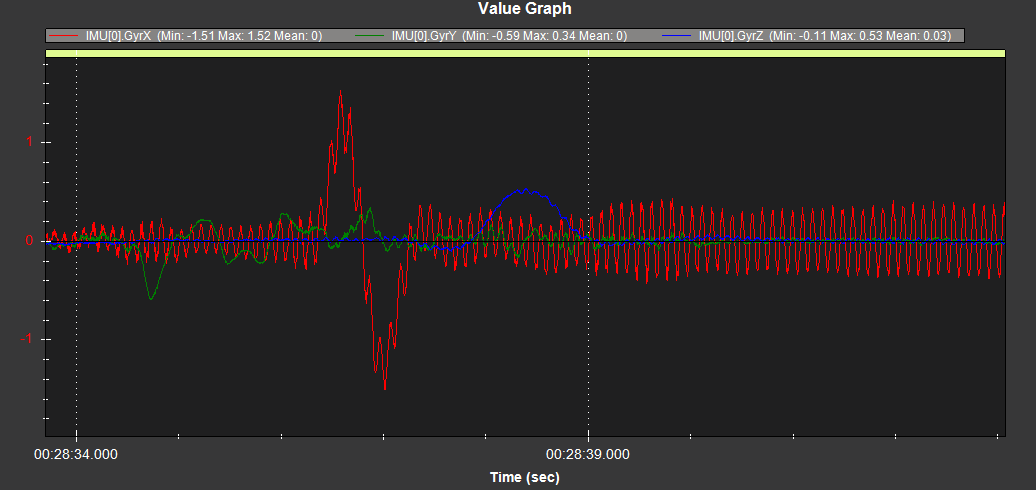
Your gyro’s X-axis seems to be dancing, but from a higher vibe it seems that you are not using a shock-absorbing platform. I think you need to check for mechanical problems, such as a frame that is not strong enough.
If I don’t see the complete log, it’s hard for me to imagine this plane taking off.
In short, your data looks like a mess, and I think you can start with the mechanical or shock-absorbing parts. You were right not to do an autotune, otherwise you might lose your beloved plane.
Hey there, no I don’t think that’s the warning… it was just saying FAILSAFE on the Hud after taking off… on the ground it was fine, but once we got into the air about 10-20 meters it would give us the failsafe warning. We still had RC control so I don’t know what it was about, tried swapping from a Futaba to a crossfire and that didn’t fix the issue.
The autopilot itself is on a flexible plate that I think could be causing vibration issues. I’m going to remove that plate and just mount the autopilot on the bottom of the fusealage on some sticky pads that the pixhawk came with. Maybe that will help with some of the X axis vibrations.
Hmm, could be that but it never said “RC FAILSAFE” on the HUD, just “FAILSAFE” so I’m not sure.
Unfortunately I cannot share photos of the plane, the company has proprietary hardware and an NDA agreement with us and won’t allow us to share it. But it’s a pretty basic arduplane setup with a traditional 900mhz telem radio and c2 link. I’ve flown tons of planes and multi rotors in the same config but never had to use a VTOL setup before now. Just not sure why I’m seeing this failsafe error and also why the crazy oscillations when transitioning from plane to quadcopter mode.
It’s okay, I understand, because I have the same troubles.
I just reminded you that there is a significant safety hazard in vibration, but I didn’t see what caused the oscillation during transitioning from plane to quadcopter.
I’m sorry, because I’m not very familiar with the mechanism of qplane either. I also saw oscillations from the log. I think it might be some kind of coupled oscillation, but I’m not sure.
I think you can try turning on the IMU Batch Sampler, which will help analyze the vibration frequency and see what is causing the vibration.