Issue details
I was running tradheli 3.5.4 with the throttle set as setpoint mode and setpoint to 1425.
H_RSC_MODE | 2 | | 1:Ch8 Input 2:SetPoint 3:Throttle Curve | Determines the method of rotor speed control
H_RSC_SETPOINT | 1425 | PWM | 0 1000 | PWM in microseconds passed to the external motor governor when external governor is enabled
At ch8out at version 3.5.4 it gives out the right setpoint of 1425.
But at version 3.5.5 is gives out whatever is set on SERVO8_MAX ignoring the setpoint of 1425
SERVO8_FUNCTION is checked that is 31
Why is this happening? is a bug of V3.5.5?
As first time posting a HUGE THANK YOU to all developers for their time and effort to keep the project alive!
A value of 1425 is not a valid value for the H_RSC_SETPOINT. Would it possible to export your param file from your Pixhawk and post it here, or on a hosting service such as Google Drive or DropBox, and post the link to it?
Seeing the parameters would help to diagnose the problem.
In version 3.5.4 i was tuning the heli. The throttle was working properly. the H_RSC_SETPOINT i think by default was around 1700 but i then set it to 1425 to reduce the headspeed. After some flights i upgraded to 3.5.5 and the throttle was not working (esc not arming). As i read the H_RSC_MIN/MAX are not working anymore. (this change was not mention in the changelog).
By investigating i found out that the Servo8 min/ max replaced the H_RSC_MIN/MAX but i also see now that the range of H_RSC_SETPOINT is between 0 and 1000. I will look at it.
Where can i find such changes from 3.5.4 to 3.5.5 as their are not mention in changelog?
It is a bit dangerous such chances without knowing. (after seeing throttle not working i am worried about all the other parameters also).
I will try to post my parameters list tomorrow as the heli is not available now
Thank you
The RSC_SETPOINT has always been 0-1000. The commit that moved the old RSC_PWM_MIN/MAX values to the SERVO library is this one (to master, but was also PR’d to 3.5-backports) but the range is the same and for an electric should be set to 1000 MIN, 2000 MAX. The only reason to change those would be if you are flying a helicopter with an engine that has a throttle servo, to set the endpoints for the servo.
As noted earlier in the thread we may look at changing that for heli because the defaults are 1100 and 1900, and I don’t know why that was done as a global default for the SERVO MIN/MAX. But it prevents ESC’s from arming because most require a signal < 1.06ms to arm.
So I would suggest setting the SERVO8_MIN to 1000, SERVO8_MAX to 2000, SERVO8_TRIM to 1000 and SERVO8_REVERSED to 0. This is assuming you have an electric helicopter. If you are flying combustion engine let me know because those limits have to be set different for the throttle servo with piston engine.
The H_RSC_SETPOINT has had no changes. The values are 0-1000, which is scaled as percent throttle x 10. So, for instance, a setting of 700 would be 70% throttle signal to your ESC.
I do not understand the 1425 RSC_SETPOINT you were using. Even in 3.3 or 3.4 the range has always been 0-1000 for that parameter. And it is only valid if you are using H_RSC_MODE = 2. If you are using RSC_MODE 1 or 3 that parameter is not used.
Once I get a chance to look over your parameters I will be able to see more about your setup.
Thanks!
Chris is right, the setpoint parameter has always been scaled as 0 to 1000. The default value is 700. Which produced a value of 1700 in 3.5.4.
So I performed a test with 3.5.4. I entered a value of 1700 for the set point and mission planner warned me that the value was outside the recommended range. I wrote the parameter to the flight controller anyway. I proceeded to arm and engage with this and the pwm that came out CH8 was 2700. I’m not sure what the ESC would have seen if CH 8 was given this value. Again that was using 3.5.4.
In 3.5.5, I put the set point at 1425 in Mission Planner full parameter list page and it again told me that the value was out of range but I wrote that to the aircraft. As you reported, the pwm output on ch8 was 1900, the max value for the servo. When I set the setpoint in mission planner to 425, it output 1440 pwm on channel 8 which is slightly different because of the min/max endpoints are defaulted to 1100 and 1900 respectively.
I’m sorry for your unexpected result when you moved to 3.5.5. I also apologize for not making is clear in the change logs that the min/max values had changed. I’m not sure why things work with entering a setpoint of 1425 in 3.5.4. I would have thought that you would have got a high value like you did with 3.5.5. I think the 3.5.5 software works as it did in 3.5.4, except with the fact that the default endpoints have changed which affects the output to the ESC.
If there is anything I can help you with on the set up, please don’t hesitate to post to the forum.
The move of the heli RSC PWM values to the SERVO library became necessary when the DDVP fix was submitted to get TradHeli more inline with the latest code. It would be nice have a place where a service bulletin could be displayed for things like this when users upgrade. I suppose a sticky post could be made in the Trad Heli support forum but I don’t know if the forum software supports that.
The best place for it to be would be in the ground stations. But there is no system currently in place to do something like that.
In the new setup wiki for Trad Heli that will be going in soon I did cover the fact that those parameters must be set to 1000 and 2000. But that does not cover users that upgrade from <3.5.5. It is not a safety issue since all it does is prevent an electric ESC from arming.
It is generally accepted that upgrading from one major release to the next will involve a LOT of changes. But that is not normally expected with point releases. I still think a service bulletin system would work the best.
Thanks. Yes I just looked at it. I still find it surprising that the output to the ESC in 3.5.4 was acceptable.
We will work to update the heli setup page to reflect the proper inputs to the software. I see some other inconsistencies. Again I apologize for the errors/inconsistencies.
By testing it now, if i manual put values at H_RSC_SETPOINT (v 3.5.5) lower than 1000 at parameters list,i have reduced headspeed.
(Bill you wrote" I see some other inconsistencies.")
It would be nice if you point them out, to be aware of!
Thank you for helping me having a flyable heli again!!!
This param is an issue. It should be set to the minimum value of throttle that the heli can fly at.
H_RSC_CRITICAL,1
These don’t make sense. The min and max should be set to 1000 and 2000 for electric ESC.
H_RSC_PWM_MAX,1150
H_RSC_PWM_MIN,900
And this is outside the range of min and max and should be from 0-1000.
H_RSC_SETPOINT,1500
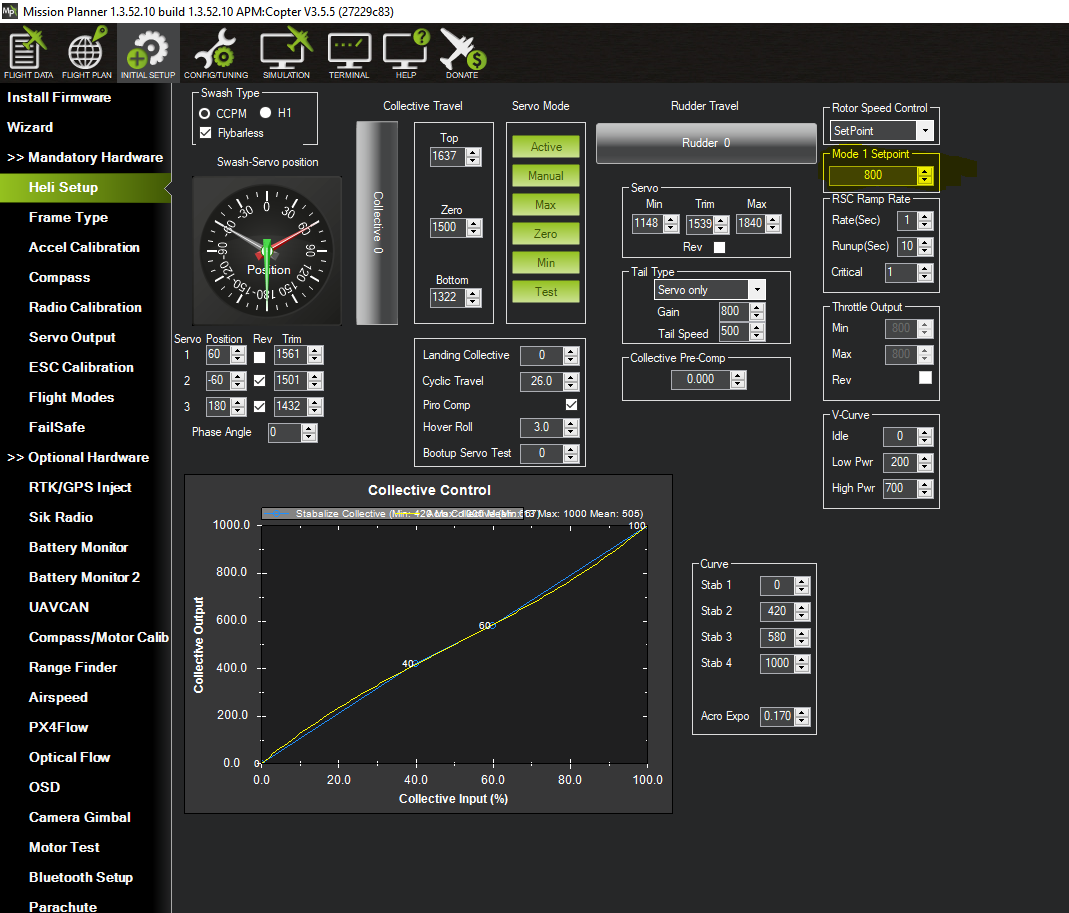
I’m guessing these bad settings were made by Mission Planner. The heli setup page has worked according to some reports at various versions of the firmware. Other times it has been a known issue with not working properly. And is why we recommend to always use only the Full Parameter List to make changes for helicopters. In this case Mission Planner is not even showing the correct throttle mode being used in that heli page, and a range of 800-2200 would be valid for MODE 1, but not MODE 2, which is what is being used here.
So Mission Planner is the sole problem. I have never used Mission Planner myself, as I don’t have a use for a Windows computer. But it set up the heli incorrectly. If any of the other ground stations were being used, it would not have happened.
The third video in the wiki covers setup for electrics using MODE 2 and MODE1, depending on what type of governor you have:
This Mission Planer Heli Setup page worked perfectly until FW 3.3. Rob Lefebvre mentioned it in his now old Heli-setup video that that Heli Setup page in MP has to be updated. It has never been done properly. I never use it for that reason. Full Parameter list only!
It would be interesting to find out how many people are still using it. It used to be all there was, but there is now four ground stations you can use to set up a heli. With the majority of folks going to mobile platforms, those are the platforms that get the bulk of the development effort. Unfortunately, MP is C# and .NET which I can do nothing with, nor do I even own a Windows computer to test it.
I think the best at this point would be for users to identify what the problems are with it and post an issue on the GitHub issues list so Michael can take a look at it.
Matthias,
With arducopter 4.0.3, mission planners heli page was updated and will only work with arducopter 4.0 and beyond. Unfortunately the stable release of mission planner that contains that change has not been released. The latest release of QGC does contain the same heli setup page for arducopter 4.0. So you can use that GCS until MP is released.
Edit. I forgot to mention that you could download the beta version of MP to use the heli page