Problems with the MB1200 XL-MaxSonar-EZ0 analog sonar and frameware 3.5.0 rc4
When I installed 3.5.0rc2 the sonar worked normally but after upgrading to 3.5.0 rc3 the sonar stopped working.
If I install a stable version (3.4.6 last version) the sonar works normally
In version 3.5.0 rc4 I got to reset all parameters the sonar returned to work but after I did the calibration of compass and initial wizard the sonar stopped working again.
I think it’s a failure on RC4
I USE QUADCOPTER AND FRONT SONAR
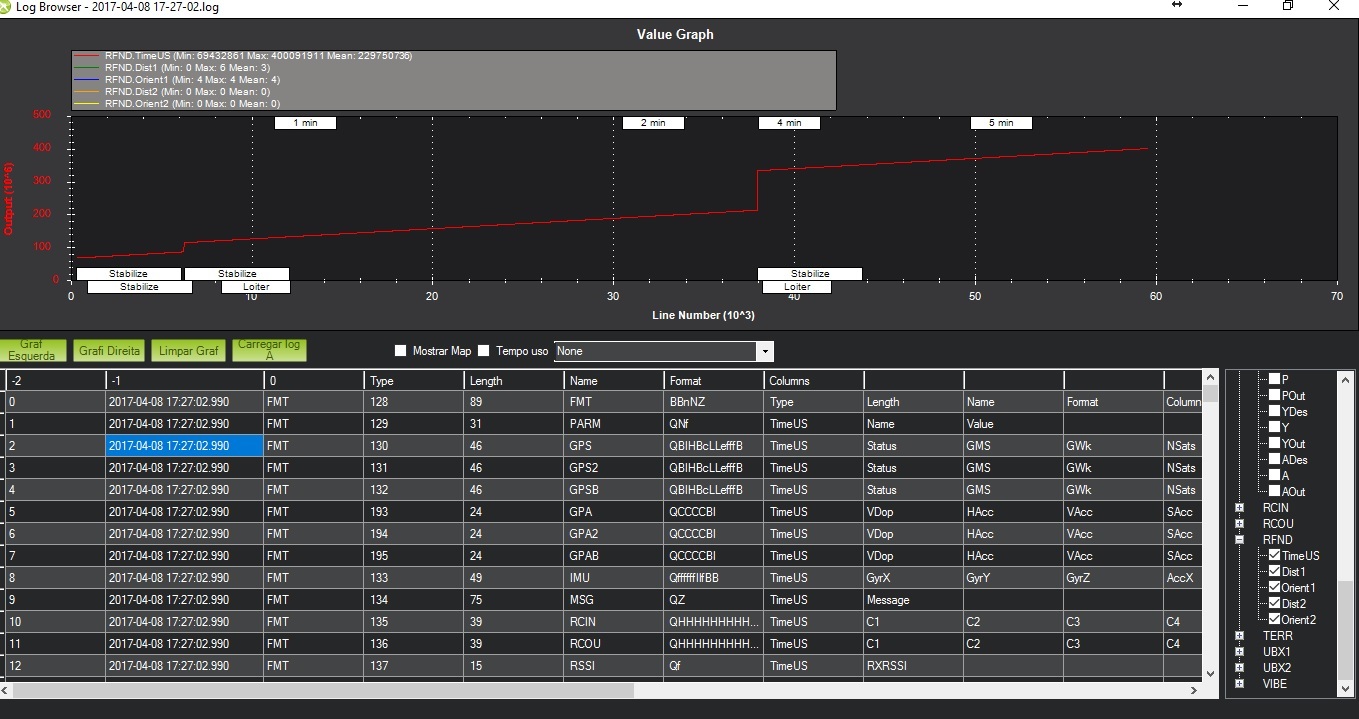
sonar range and sonar volt = 0
Log File C:\Program Files (x86)\Mission Planner\logs\QUADROTOR\1\2017-04-08 17-27-02.log
Size (kb) 4811.580078125
No of lines 59555
Duration 0:05:30
Vehicletype ArduCopter
Firmware Version V3.5.0-rc4
Firmware Hash bd6acd96
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = GOOD -
Test: Compass = FAIL - Large change in mag_field (62.67%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.54, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1371, 1413, 1390, 1403]
Average motor output = 1394
Difference between min and max motor averages = 42
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = UNKNOWN - No CURR log data
Were these the logs you wanted to see?
Anything else I can post?