Hello everyone, I’ve been working with apm for years, without any problems, but now since the month of December 2017, I have a very frequent problem with APM 2.8 without an internal compass and GPS-enabled mode such as - Loiter- rtl-, When the engines are disarmed in stable mode the dron makes the flight very clean and perfect the problem is when
In Loiter Mode once activated frequently with 9Satellites to 15 satelites and a hdop 1.0 to 1.5 frequently, the dron has falls of location the Dron makes ups and downs only, is very unstable, after checking for my Tower via android that had correctly everything Made, in GPS Modes it is impossible to be still, I decided to build another 2 new quadcopter completely with the same components and back do the same, and verified that the orientation 180 is correct, that the compass is correctly, and everything correctly, now this It happens with all the new mounted drones, I do not know if it is the versions of fimeware of MP, and practically tested all the versions of MP in my apm 2.8 and all the apm controllers, this only happens with APM with pixhawk this does not happen that can be happening?
I have many commercial frames flying doing surveys with this board and firmware and it triggers fine.
As you have found out, you cannot shoe horn later versions of firmware into the APM and have it work correctly.
Arducopter 3.2.1 is the last, and most advanced, firmware revision that supports the APM flight controller.You do not have a better option. So to answer your question, use 3.2.1.
I have the same problem with me apm 2.6 with this firmware, in mode loiter the drone can not keep the position, and he goes up more and more, and today im try to upload other firmware version but, i can not because the Listed dont appear .
I still have the problem with the version arducopter 3.2.1 in loiter mode is very unstable, is very bad, rtl mode also goes crazy, and tested all versions, more than 10 different gps, more than 9 apm 2.8, they all become Crazy when active gps mode loiter, auto, rtl, I’ve been using these controllers for years without problems but now it’s impossible to run gps mode, can someone offer some idea of these problems, some configuration file that they can send to my email?
Canarias-Stock- You may try posting in the 3.2 thread and supply a log.
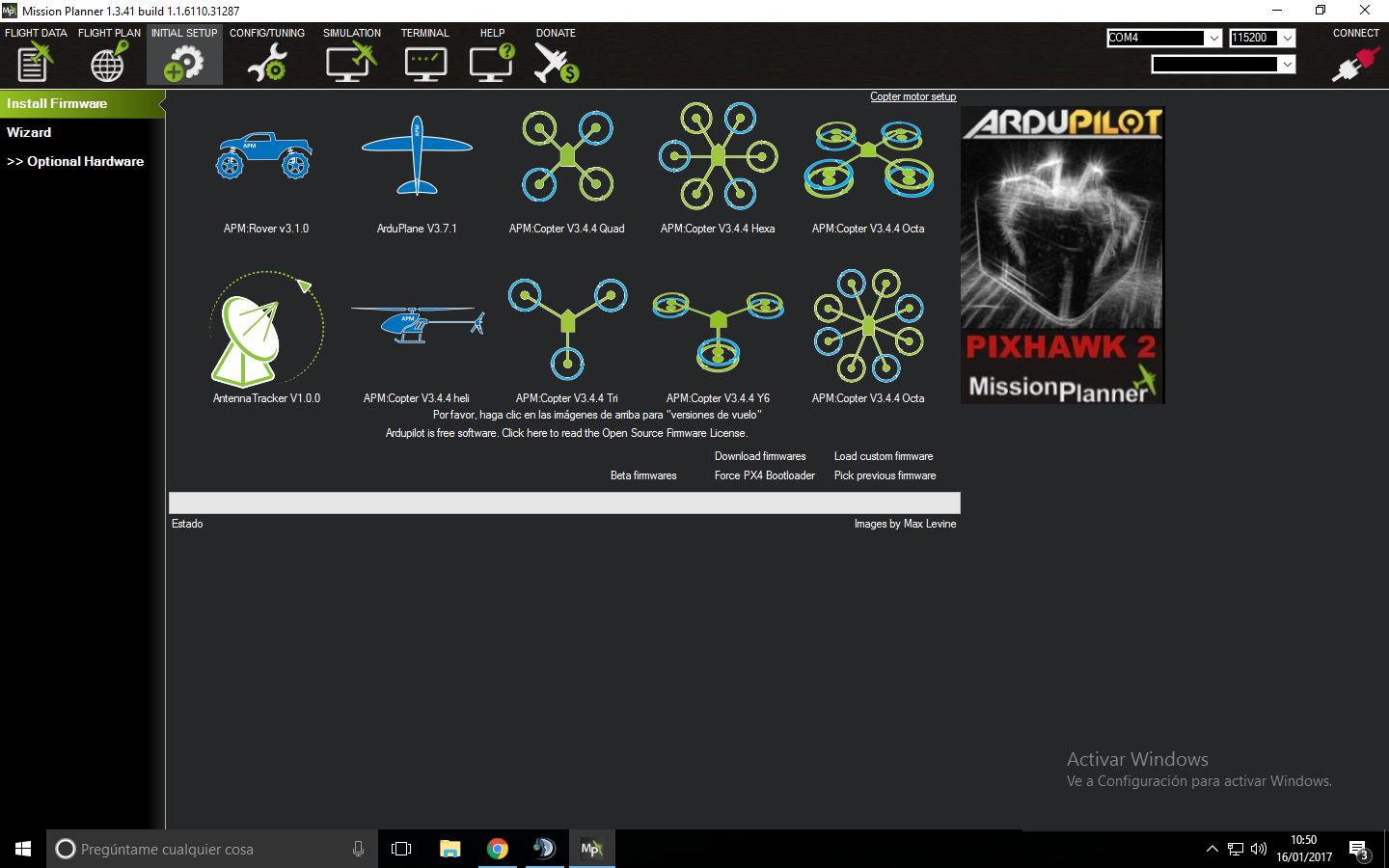
iZeusj- Select the current stable in Mission Planner (3.4.4 as of today) and it will install 3.2.1 on APM. It detects which FC is connected and will load the appropriate firmware.
I was also trying to setup APM2.8 (AC3.2.1) but faced different kind of similar issues. After closely observing the progress of copter development , I decided to stop troubleshooting on APM/AC3.2.1 and buy PixHawk. I am waiting for my shipment and then I will start the setup.
I think it is better to spend time in improving flying skills + reading ardupilot wikis (while waiting for PixHawk to arrive). This will be much better than struggling with bugs in AC3.2.1.
Yesterday I installed 3.1.5 and it seems that in this dron everything was fixed in a hurry, but after mounting another dron with the same components the same thing happened, it seems that Loiter mode failed, but PosHolt mode does not occur the problem
Hello and tested all current, older versions, all kinds of changes, such as changed gps, changed apm, motors, drives, everything you can imagine, and in Loiter mode continue very unstable, lost and even changing mode Stabilized to Loiter the dron in one occasion lost the altitude and gave on the ground a strong blow today, then reassembled everything new, and continues the errors with loiter mode, this is stressful, to know that he is mounted more than 100 drones with APM Without fail and now 1 month here only have continuous faults in gps mode, can someone send a photo with the placement of the cable compass to 12ic? And the jumper connected to the apm?
I connect the jumper jp1 in place, I also connect the other jumper in the 1st position, then the compass cable next to the power module cable, and then the gps cable
Anyone have a current photo of your apm running? Any configuration file which I can upload to my apm?
You are posting in the wrong place. The APM 2.8 has the compass connection to the port below the GPS connector. Jumper out to disable the internal compass.
Ok sir, I’m not going to post here anymore, pardon, and checked the compass under the gps port, and bypass the first jumper and the same thing happens with versions 3.1.5 and 3.2.1