Hi. I have a Navio 2 running APM:Copter V3.5. I have just moved the board onto a new frame which is exactly the same as the frame shown in this Project share: Quanum Spider 700 Quad
I did all the usual calibrations: set frame type, accel, rc, compass, esc, etc and took my bird out for a maiden flight to see how it went. I started in Stabilise mode.
What I found was that as I was lifting off it was very tippy. I throttled down before it got too high in the air in case it was going to freak out and damage itself. I tried a few more take off attempts very carefully watching what was happening. It had a couple of roll overs on takeoff.
I had a look at the logs to see what I could find. I can see that vibrations are NOT a problem. I triple checked the motor layouts and they are ok. I re-calibrated the ESCs and I dont believe its a problem with ESC calibration.
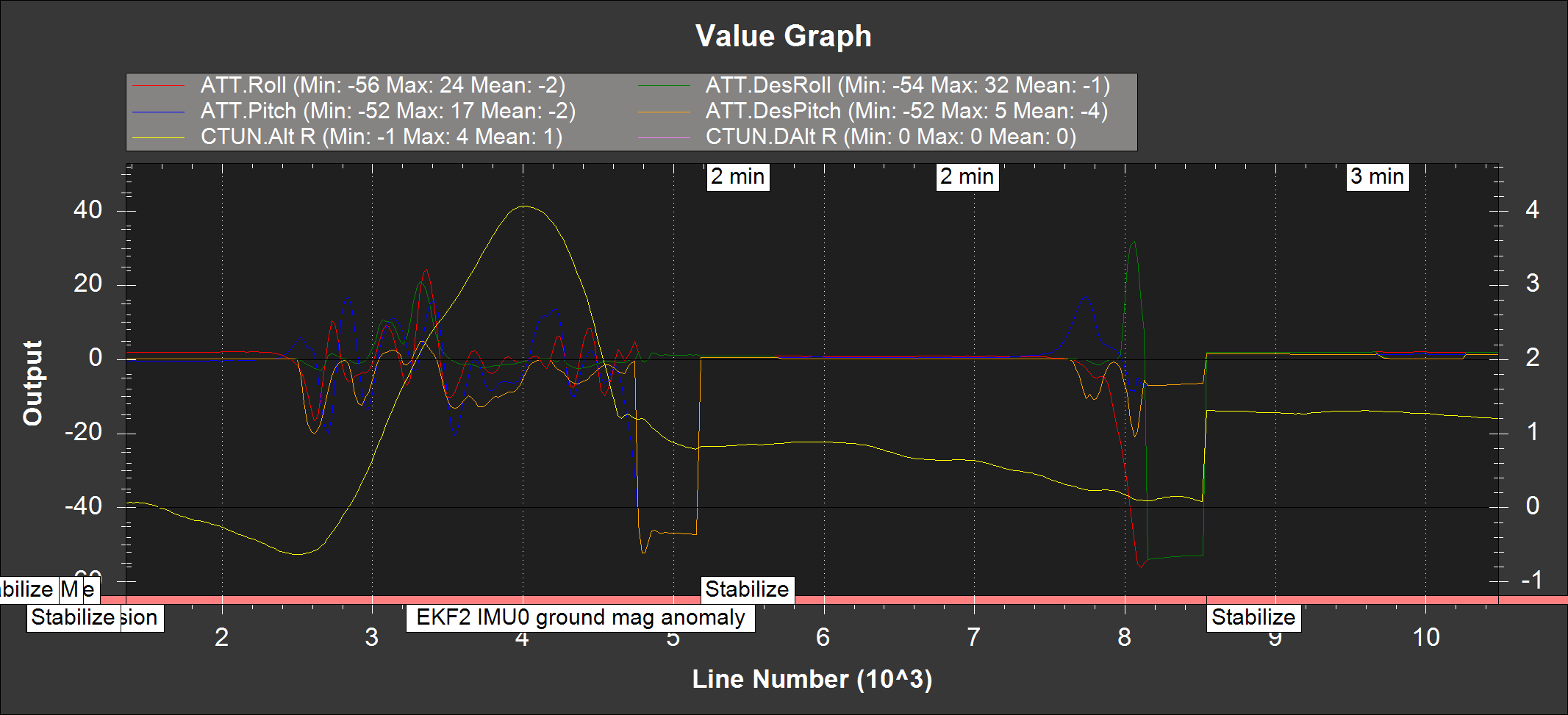
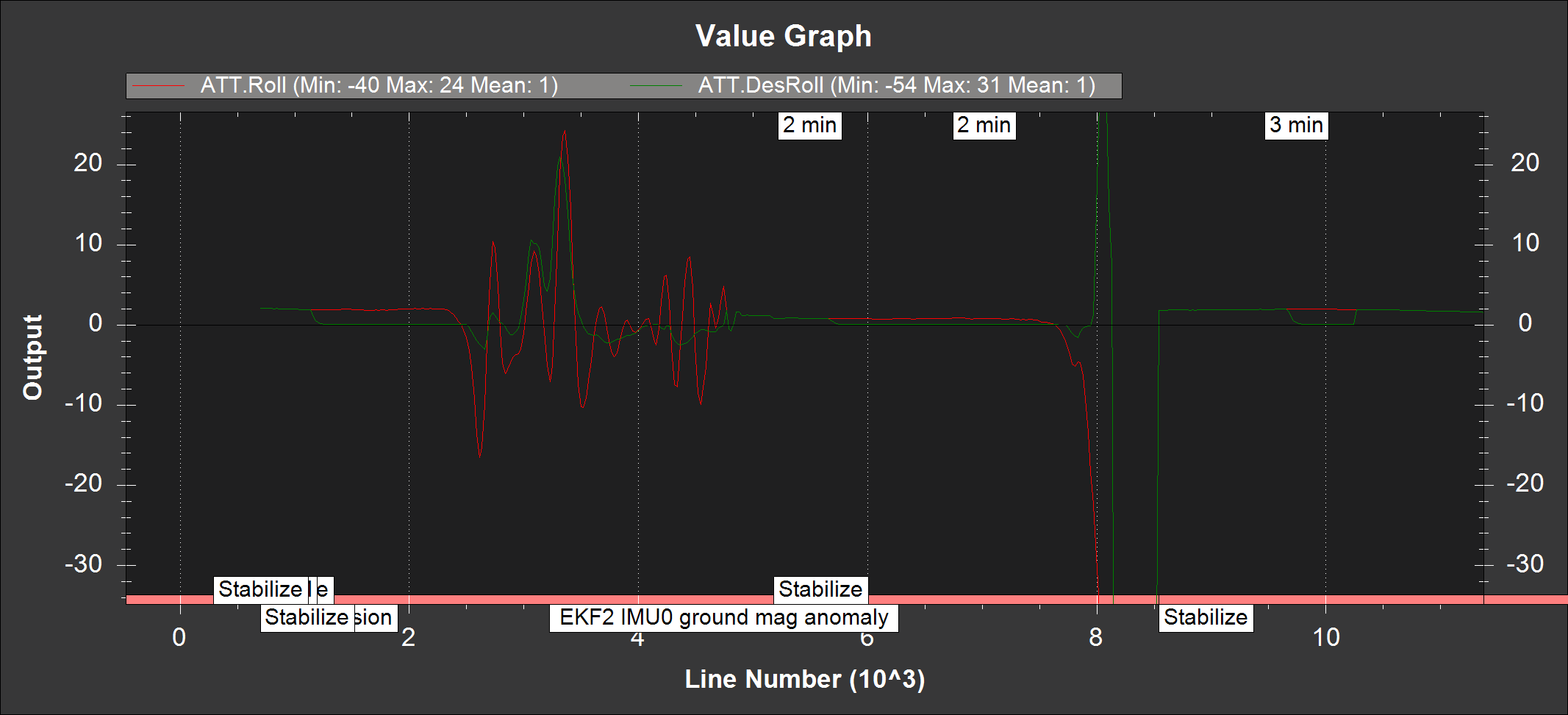
I did notice some some differences between desired roll and pitch and actual roll and pitch and I wondered if that represented a problem? Are the deltas between desired and true roll and pitch too high? Is this just a tuning thing and should I be tweaking some settings? I was hoping for some help to interpret the logs.
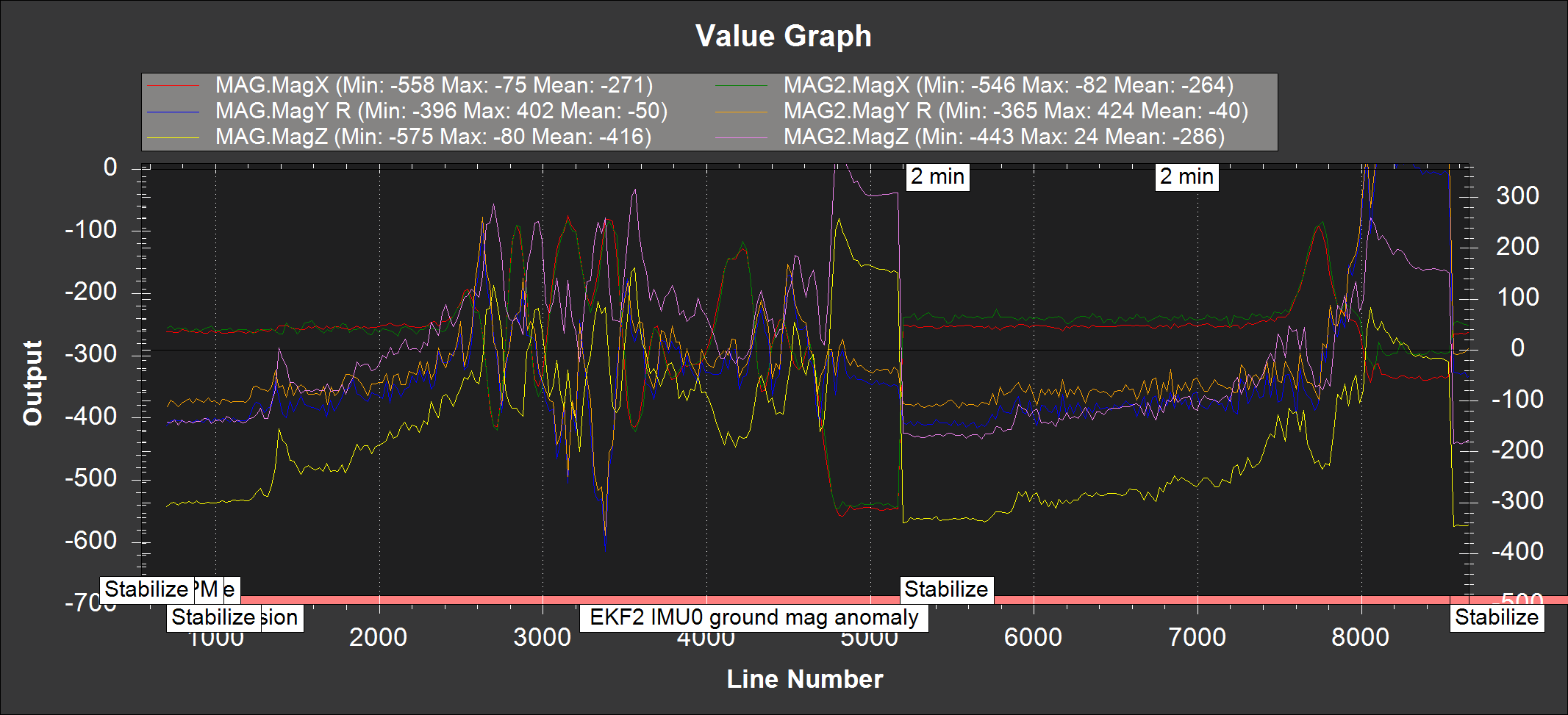
I also noticed that the mag readings looked particularly variable as I throttled up. I know the internal compasses on Navio are a little controversial. Could this compass interference cause the problems with attitude that the prior log images show?
I have since attached an external Compass I had lying around and I will try that again when the weather allows.
Any help in log interpretation would be much appreciated!