It’s been quite a few years since I was here. I have about 4 or 5 Pixhawks from whn V3.3 was new, around the time Iris was coming out. I’m trying to set up one of the Pixhawks on a small racer. I’ve set up the hardware and using the latest Mission Planner, loaded V4.3.7 onto the Pixhawk, I’ve done radio calibration and set control limits. But when trying to calibrate ESCs I set it up to start, with radio on and setting throttle to max, then turning off and on the Pixhawk (w/battery). Using the switch though I don’t get the solid red, nor the initial tones from the motors. So I can’t calibrate.
I think I see some kind of error in “messages” about “1M use Pixhawk1”
As soon as possible set up voltage monitoring , then use the Initial Parameters calculator in MissionPlanner / Setup / Mandatory to set a few things. Also select “Suggested” settings. Accept everything it offers to write to the FC.
Then set
Fails about the same place. After setting esc mode to automatic (3), unplug everything then plug in the battery, Lights flash, there’s a long tone, and then nothing much more. I don’t get the battery count. just a low volume tone every 3 or 4 seconds. This tone I think comes from the motors.
No go!
It’s possible that the ESCs are 1Shot or even 1Shot125. Ugh. Chinese products 4+yrs old, no documentation. I have a vague recollection of them being 1shot125… Darn, it just couldn’t be easy now could it!! Have to see if the ESCs have any identification.
I tried one shot configs and nothing still. I see there are no servo outputs indicated. I don’t remember ever having to set them manually. Even if I do, nothing seems to wrok. I know this drone worked with the controller that came with it.
I’ve set frame type in the parameter tree and output servos show values. But still cant calibrate ESCs and when I try to do motor tests, It beeps before starting, pauses the time indicated and beeps for ending. Motors don’t spin.
In messages the only error now appears to be GPS (I’m indoors) and in any case I still have prearm checks disabled.
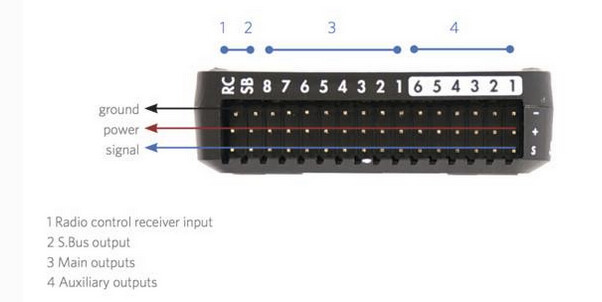
Check in the MissionPlanner / Setup / Mandatory / Servo Output screen
and verify you ESC connections are using the same pins.
Check the ESC wires are to the correct pins, signal wires along the bottom row, ground wires along the top row.
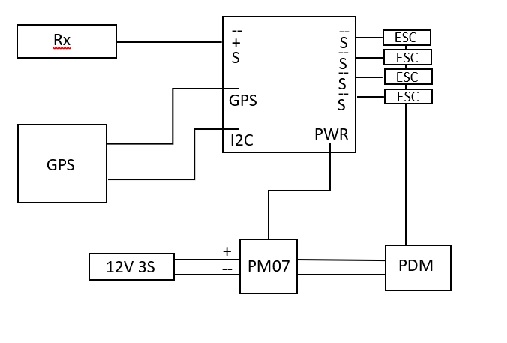
Yeah, thanks, ESC connectors: Grd and signal as indicated. RC: Grd, Pwr and signal as indicated. I measured Pwr (to the radio) and see what seems a little low. 4.7 to 4.8 V depending if I have the battery plugged in. I’ll send a wiring diag: I have Pwr Module, GPS & Dragonlink Rx
A diagram. The PDM and ESCs previously worked with the original processor. One of the standards for Eachine racers. ESCs connected on ch1 @ ch4 Negative above, Signal below as indicated in your diagram, Standard PWM.
I see you’ve probably done a lot of this stuff before, so excuse me if I’m stating the obvious or preaching to the converted
The servo and motor settings look OK. I dont see anything that would stop MissionPlanner motor test from working if you have battery power to the ESCs.
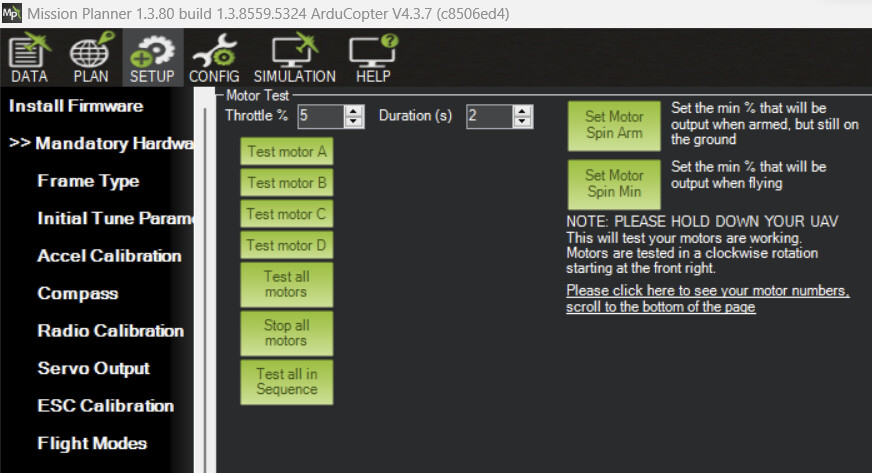
In the motor test page, you should see buttons for motor A B C D , and you’ll probably need to set percentage 10% to get a motor to spin - PROPS OFF !
Exactly what ESCs are they?
If you are thinking of replacing the ESCs then yell out before you do.
The only other thing I can think of trying is moving the ESC connectors to Aux1 , 2 , 3 , 4 and use the servo page to change the Motor1 to Servo9 and so on…
This will rule out a problem with the IOMCU.
And the good thing is you are 80% of the way to using DSHOT too but that’s another bridge.
Dont skip the arming check or battery voltage settings - if they prevent flight then we fix the issue rather than disable the alarm. The other parameters will gather some data.
Yeah don’t worry about overstating anything. You never knw when some little thing sneaks by. I did try the Aux channels with 1Shot and 1Shot125, same results. I raised the motor test percentage as well, more than 5%, I think I tried 10% but wasn’t sure to take it further. I could try up to 20 in small steps.
The Pwr Dist module and ESC wiring and config has worked as is, so the conections must be OK. I’ve got a scope and I’m going to measure the signals and voltages… hopefull that will give some clues.
Yaaayyy, I’m working!! I tried motor test with 10% and the motors ran!! I had never put more than about 7 I think. Once I knew the motors were working, I saw that the battery voltage was reading low so I adjusted the multiplier on that. I couldn’t get past prearm tests because I had the fence enabled, diabling that I could arm and the motors responded to the controls!!
Now I have to put things back to run mode with the adjustments you mention and progress to next stages. It’s raining this weekend, so I don’t know if I’ll be able to fly, but I’m on my way. I’m probably quite rusty, but I’ve got a good autopilot so as long as it doesn’t run away on me we’ll be OK.
Thanks for your help. Being away for so long I didn’t know if there were still people available in these forums.