I purchased a Here+ kit several weeks ago. I can get a successful SurveyIn (I’ve been doing 0.5m) in an open field, but the Rover GPS mode only bounces between 3D-DGPS and RTK-Float, it never achieves RTK-Fixed. The tests I’m doing is static, with the drone about 30-40 feet away from the base station, so strong telemetry radio link (57600 baud). Any suggestions on what I might be doing wrong? Thanks!!
Hy Don,
Have updated your GPS with the newest u-blox firmware ?
This update fixed all my problems.
Here is a link for the update: http://ardupilot.org/copter/docs/common-here-plus-gps.html
Hi Jan,
Yes, the first thing I did was update the firmware on both the base station and the rover. I also made sure I’m running the latest version of Mission Planner / ArduPilot.
Are you able to run in RTK-Fixed mode?
Don
I have the same issue here. I updated the firmware on both the base station and the rover as soon as I got them. My unit just stays in RTK float the entire time. Unable to get RTK fixed. If anyone has any tips that would be awesome!
Perhaps someone could comment on the required parameters to achieve RTK fixed? The documentation mentioned “signal strength” being an important factor, but it did not specify which signal.
I am using at HERE+ system with both the rover and base station updated to the 1.30 firmware version. When I fire up the base station, power on the UAV and connect via MAVLink I immediately get a RTK Float status. But it’ll just sit there (I’ve waited up to five minutes without moving the UAV). During this period my telemetry radio signal strength is >97%.
Any help or ideas would be greatly appreciated!
Could be a few things: insufficient signal strength or poor GPS constellation alignment. Never used HERE, but it may need a ground plane for the antenna. I’ve also heard stories that L1 only GNSS systems can take up to 20 minutes to achieve a solution. Don’t know how accurate that is. Make sure you have clear skies in all directions.
Tyler, I’ve been very frustrated with the Here+ system. I’ve tried a bunch of things over the last several months, including adding a ground plane to the Rover, switching to a really solid radio link, etc, and have never succeeded in getting from RTK-Float to RTK-Fixed.
Has anyone out there been successful in getting a solid RTK-Fixed solution with the Here+? And if so, what did you do to get it?
Don
1 Like
Hey Don,
Yeah, I’m really puzzled on this. Actually, I feel like I must be looking in all the wrong places because I can’t seem to find any solid documentation on the Here+?
I’m going to try and drive out to a spot where I have 360 degree clear horizons and see how that works out. I’ll definitely report back this weekend.
Tyler
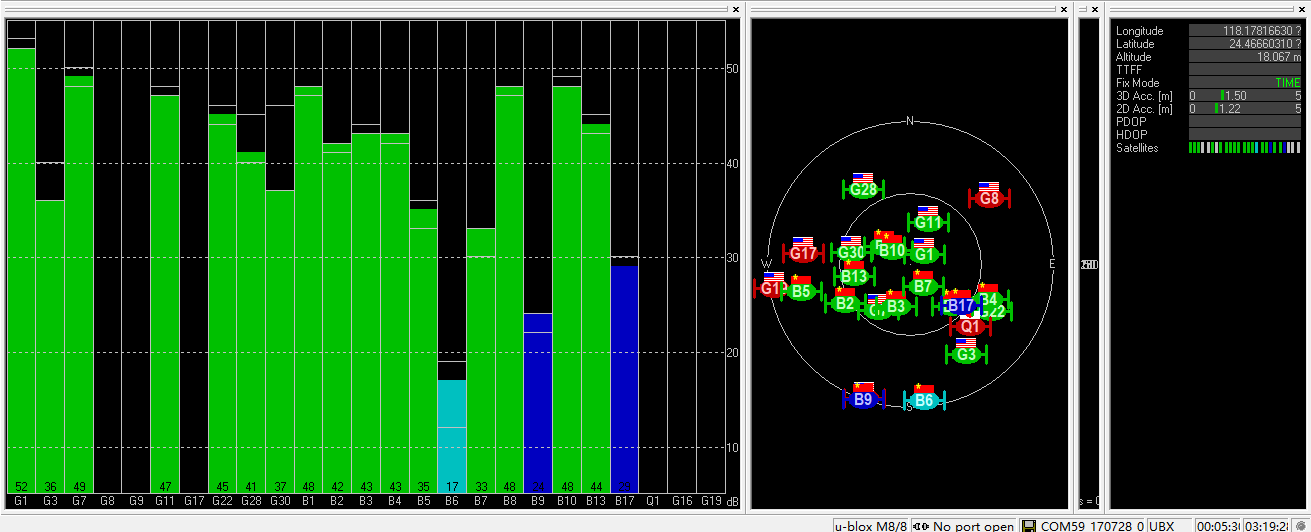
@tmives The signal strength it’s referring to is the signal/noise of each satellite. MP does have a display of this information according to the wiki (for the base GPS) http://ardupilot.org/copter/_images/HERE+_Mission_planner_2.png You can check out the aircraft one from u-center (it would look something like this http://ardupilot.org/copter/_images/HERE+_Time_Mode_A.png )
{kind=link}
{kind=link}
I’m using Drotek’s M8P, which I think should be very similar to the Here+, and I can tell you it does work. Sometimes. My sense is that it depends on how well the base is receiving. Somewhere I read it requires X number of satellites with signal higher than Y db to do fixed, but I can’t find the source for that.
Desuetude,
Interesting. I’ve heard that the DroTek solution is somewhat different than the Here+, and some have said that the DroTek system is more robust. For example, I’ve heard the antennas might be better quality, and that they use M8T receivers. Would be curious to hear from someone who has tried both. I just got one of the DroTek M8T receivers and it seems very nice. Will check out its RTK capabilities in the coming weeks.
@dakelly M8T provides timing information only. You can use it for RTKLib to do the RTK calculations on a companion computer (this is what Reach does) or do PPK, but it will not do RTK onboard. M8P’s are needed for that.
I would be super interested in that source if you ever run across it again. I’ve taken my base station to the coast just to ensure that I have excellent sky visibility. Still can’t get a fixed status. Would love to confirm that my issue is in fact signal related.
Very puzzeled.
tmives,
Looks like you’re having the same luck as me. I’m convinced that I wasted my $$ on the Here+ system. Maybe it can be made to work with higher gain antennas. Would be nice to see what someone has done to get RTK-Fixed mode with them, but I think the lack of responses is telling.
I got RTK FIXED… For about three seconds. I went way out on the water, and had a clear 360 degree horizon.
I wonder if being next to such a large city (Boston) impacts the antenna reception (RF interference). I really don’t know anything about that. Maybe worth some research.
I guess I should try this in a more remote area?
Mine would “flicker” into RTK-Fixed once in a while, but very rarely. I still think the biggest issue is the cheap antennas that come with the Here+. I ordered a Talysman high gain antenna for the base, along with another couple of high gain antennas to test on the rover. You also need a very solid RF link, I’m having good luck with the RFDesign900x radios, but they aren’t cheap. I’m getting RTK-Fixed on another (non-flight) system that I’m testing, using an M8T board and CORS data.
Have you guys tried a ground plane?
Yes, I added one to the Rover Here+ unit, didn’t seem to help much. I will re-try soon with much better antennas (and ground planes) and see what happens. Am getting FIX with another single channel system fairly well now, as long as I’m away from trees and power lines.
I found the source from the signal strength requirements, the ardupilot wiki:
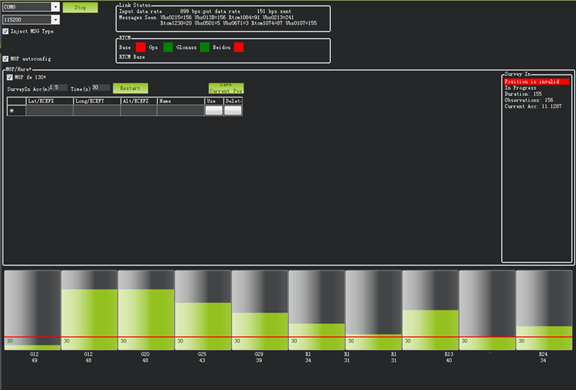
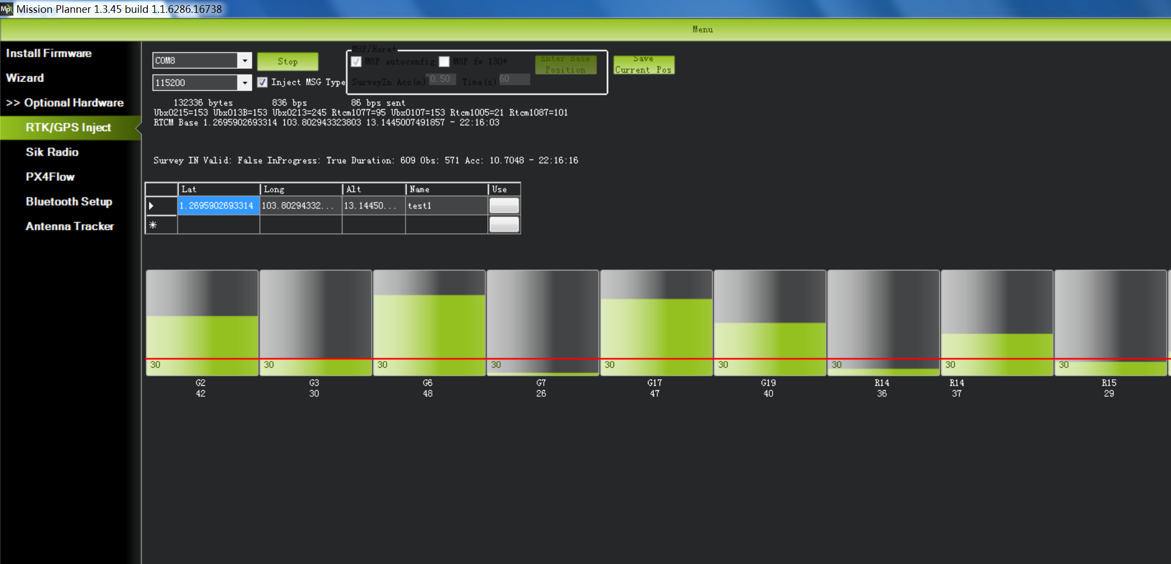
TIME Mode of base station requires: 5 GPS satellite signals +2 GLONASS satellite signals in the strength of 40 or more; or 5 GPS satellite signals +3 Beidou satellite signal in the strength of 40 or more. As shown in the figure below, only one satellite strength is higher than 40, the signal condition does not meet the RTK standard.
http://ardupilot.org/copter/docs/common-here-plus-gps.html?highlight=here
THANK YOU!
This is incredibly helpful and definitely my fault for missing it. Looks like I’ll need to spend some time in Ucenter to see what’s going on.
Also, does anyone know what the red line in this image represents? http://ardupilot.org/copter/_images/Here_Plus_MP5.png
{kind=link}
I imagine it’s the minimum threshold of signal strength required in order to be used? Not 100% sure though.