Hello I went through the tuning as if nothing had happened by wheel encoders when connected, the problem is that in the mavlink inspector the data does not respond to changes in the direction of the encoders (I use two on the right and left because my machine is on tracks) and it constantly grows
If anything, I connected the ground to the power supply and to the controller, the encoder itself is incremental and the power supply is stable (laboratory 8 V)
all the steps were performed strictly according to the guide
I don’t like it so I want the wheel encoder to help me determine the position at small distances and the GPS at larger distances
If you need anything, please ask, I’ll send you everything.
Do you have a link to the wheel encoders you used and the wiring to the flight controller?

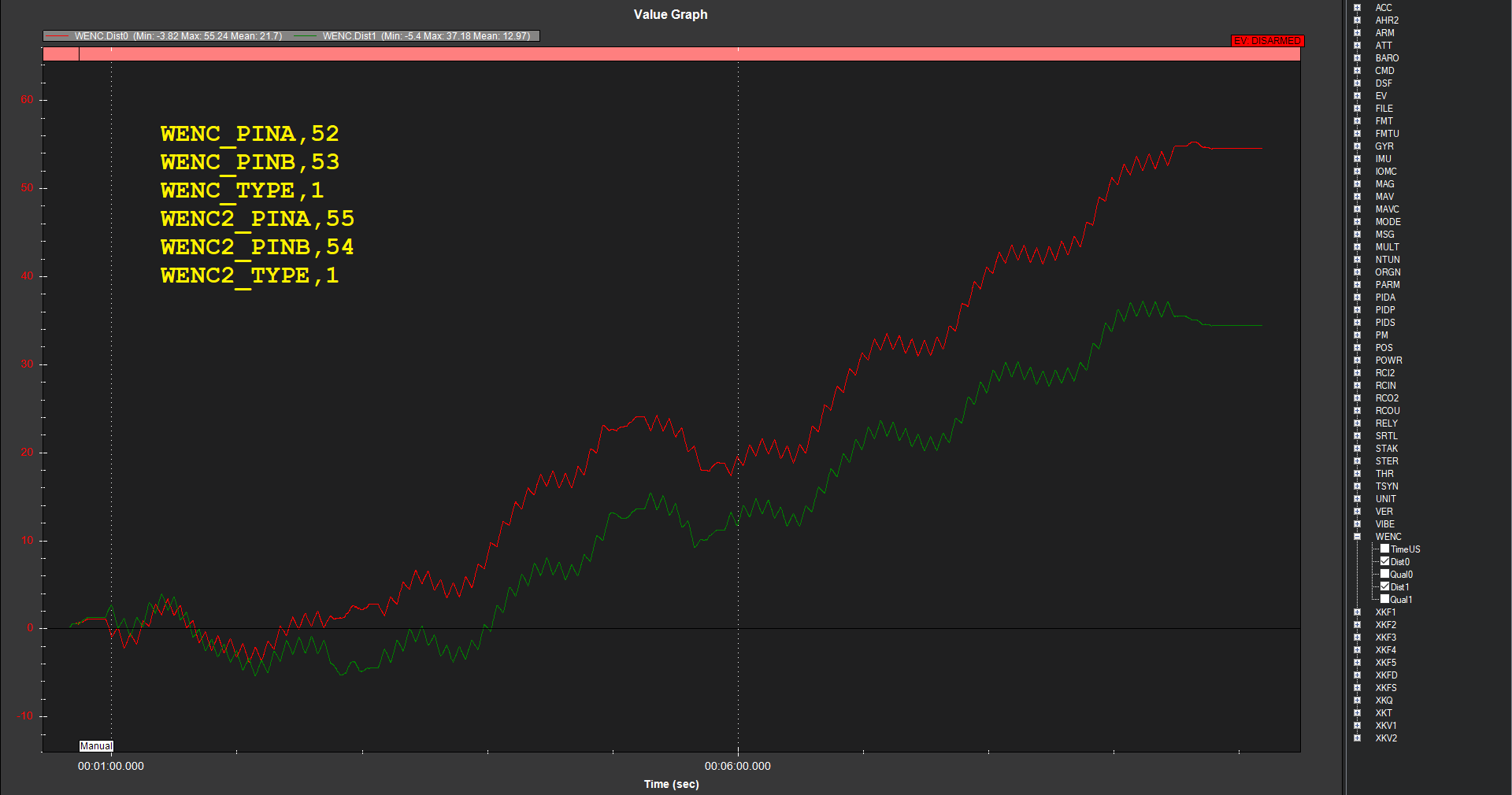
I always find checking wheel encoders easier arming, moving forward some distance (say at home 10m) and checking the log.
Image above is for a lap on a circuit. Red trace is for the inner wheel, so distance is a bit smaller.
wheel encoder I do not know if it is possible to insert such links, so I will duplicate the name E38s6g5-600b-g24n (NPN output) (600 PR)
they show data like this and do not respond to rotation

sometimes when you reboot the values begin to grow even in the absence of motion (in the short information value of ground speed also jumps in the range from 0.00 to 0.30 kph)
Now I just reset the controller and the values are like this (also does not respond to rotation)

there are these suspicious messages
I think that’s where the problem lies, but I can’t understand them because I’m inexperienced.

That does sound like some sort of electrical connection issue.
I’ve not worked with these encoders before, but Google turns up a good discussion here: FYI: interfacing E38S6G5-600B-G24N 600P/R rotary encoder - Sensors - Arduino Forum, which suggests you may need pull-up resistors and possibly a more precise 5V power supply.
Thank you very much I will be glad if it helps
Hi, can you help me again, I got a new Cuav X7+ and I can’t find the auxiliary ports to connect my wheel encoders, can you tell me which ones can be used as Aux (or where to change the type of operation so it can read encoders) just all ports are signed as “main”.
Any of the main ports will work for the X7+
I found a solution and it is like this: it was necessary to find the number of the necessary pins on the ardupilot Gpio’s website there and personally register them in the selection window A and B

P.s - there were none in the attached versions
How were you able to see the “Value Graph” for WENC. I do not see it on the list? Thank you.

how are you reading RPM from the hoverboard motors?
Two of the three encoder signals; they are at 120º, but that is irrelevant.