Hi everybody,
not really sure if i’m doing it right. Building my third copter now and i’m standing in front of a problem i never experienced.
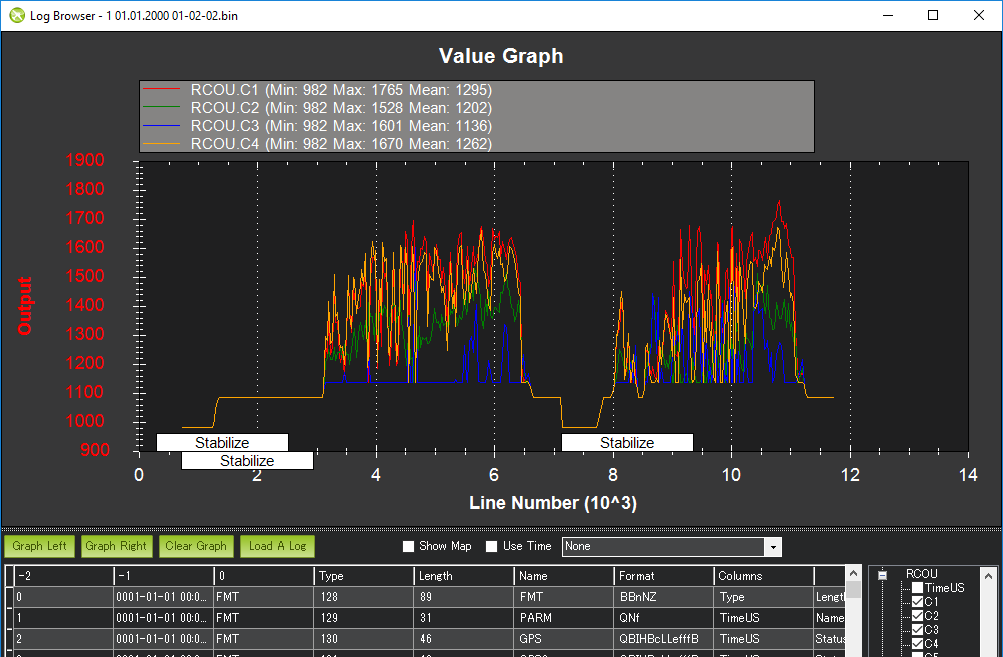
As in the attached log i experience some strange throttle “bumps”.
What I have done:
All calibrations are done, tied the copter to the ground. Armed and slowly raised the throttle on my RC. The motors start some erratic throttle changes. Mode was Stabilized. I checked the log attached and noticed that the RC03out value represents the behaviour of the motors. So i figure the spinning is commanded by the AP. With this strange and unseen behaviour I’m not really looking forward to go flying.
Would appreciate any idea how to fix this problem.
It does look similar with the logs that I think I’ve seen from iseries before in that one motor is at the minimum while the other three are working hard. This is not necessarily a problem though, it could just mean that the vehicle is leaning slightly (or turned slightly from it’s desired heading) and it’s trying to correct for that.
It looks like all the tuning parameters are at their defaults so if this is a very small copter, the gains might be too high. As iseries suggests, perhaps the mot-spin-arm and mot-spin-min are set too high. Setting the motor ranges is discussed on this wkii page: http://ardupilot.org/copter/docs/set-motor-range.html
The issue is generally caused by being too slow or cautious getting the copter off the ground.
You need to spin it up smartly and basically “jump” it into the air, to at least a metre or two.
I always get this sort of behaviour, on a new build especially, as the copter is never sitting level for takeoff, nor in the exact direction it expects, or has varied slightly from arming because you are waiting, or doing it slowly, or you have inputed a small variation from the sticks while arming, or the Tx you have has a slightly wandering signal centre, etc, etc.
There are many reasons for starting to tip on the ground.
It’s not until you get it airborne that the controller can manage to pull it all together.
Maybe… but there was better behavior on the ground in previous versions I suppose. Maybe it could be improved somehow in next versions. In extreme situation it can cause drone flip off