Hi everyone 
I want to send a simple MAVLink message to AP, exactly to SITL. I chose command: MAV-CMD-DO-SET-MODE / MAV-MODE-GUIDED-ARMED. I start from run SITL with this command:
sim_vehicle.py -v ArduPlane -f quadplane --console --mavproxy-args="--master udp:127.0.0.1:14551"
Later turn on MAVLink router: mavlink-routerd
Then I start test:
#include "../../c_library_v2/common/mavlink.h"
#include "../../c_library_v2/ardupilotmega/ardupilotmega.h"
#include "../../c_library_v2/ardupilotmega/mavlink.h"
TEST(MAVLinkRouter, sendMessageToAP)
{
int sockfd;
struct sockaddr_in servaddr;
const int port = 14551;
// Creating socket file descriptor
if ( (sockfd = socket(AF_INET, SOCK_DGRAM, 0)) < 0 ) {
perror("socket creation failed");
exit(EXIT_FAILURE);
}
memset(&servaddr, 0, sizeof(servaddr));
// Filling server information
servaddr.sin_family = AF_INET;
servaddr.sin_port = htons(port);
servaddr.sin_addr.s_addr = INADDR_ANY;
mavlink_message_t msg;
mavlink_command_long_t command_to_send;
const uint8_t sysid_thismav = 255;
const uint8_t cmpid_thismav = 1;
const uint8_t first_transmission_confirmation = 0;
const uint8_t AP_id = 1;
const uint8_t AP_component_id = 1;
command_to_send.target_system = AP_id;
command_to_send.target_component = AP_component_id;
command_to_send.command = MAV_CMD_DO_SET_MODE;
command_to_send.confirmation = first_transmission_confirmation;
command_to_send.param1 = MAV_MODE_GUIDED_ARMED;
mavlink_msg_command_long_encode(sysid_thismav, cmpid_thismav, &msg, &command_to_send);
uint8_t data[MAVLINK_MAX_PACKET_LEN];
uint16_t len = mavlink_msg_to_send_buffer(data, &msg);
/*sendto(sockfd, data, len,
MSG_CONFIRM, (const struct sockaddr *) &servaddr,
sizeof(servaddr));*/
sendto(sockfd, data, MAVLINK_MAX_PACKET_LEN,
MSG_CONFIRM, (const struct sockaddr *) &servaddr,
sizeof(servaddr));
}
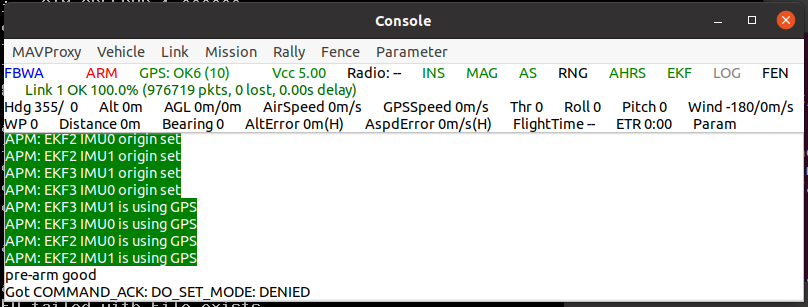
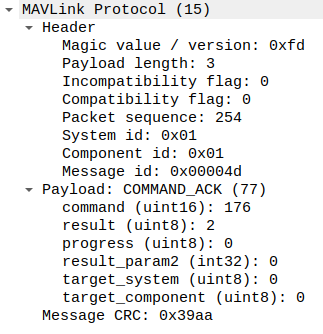
On MAVProxy console I get some random chars:
So later I tried send just heartbeat:
TEST(MAVLinkRouter, sendHeartbeat)
{
int sockfd;
struct sockaddr_in servaddr;
const int port = 14551;
using namespace std::chrono_literals;
// Creating socket file descriptor
if ( (sockfd = socket(AF_INET, SOCK_DGRAM, 0)) < 0 ) {
perror("socket creation failed");
exit(EXIT_FAILURE);
}
memset(&servaddr, 0, sizeof(servaddr));
// Filling server information
servaddr.sin_family = AF_INET;
servaddr.sin_port = htons(port);
servaddr.sin_addr.s_addr = INADDR_ANY;
mavlink_message_t msg;
mavlink_heartbeat_t heartbeat;
const uint8_t sysid_thismav = 255;
const uint8_t cmpid_thismav = 1;
const uint8_t first_transmission_confirmation = 0;
const uint8_t AP_id = 1;
const uint8_t AP_component_id = 1;
heartbeat.type = MAV_TYPE_ONBOARD_CONTROLLER;
heartbeat.autopilot = MAV_AUTOPILOT_INVALID;
heartbeat.base_mode = 0; // These flags encode the MAV mode
heartbeat.custom_mode = PLANE_MODE_FLY_BY_WIRE_A; // A bitfield for use for autopilot-specific flags
heartbeat.system_status = MAV_STATE_STANDBY;
mavlink_msg_heartbeat_encode(sysid_thismav, cmpid_thismav, &msg, &heartbeat);
uint8_t data[MAVLINK_MAX_PACKET_LEN];
uint16_t len = mavlink_msg_to_send_buffer(data, &msg);
/*for(auto i = 0; i < 20; i++){
sendto(sockfd, data, len,
MSG_CONFIRM, (const struct sockaddr *) &servaddr,
sizeof(servaddr));
std::this_thread::sleep_for(500ms);
}*/
for(auto i = 0; i < 20; i++){
sendto(sockfd, data, MAVLINK_MAX_PACKET_LEN,
MSG_CONFIRM, (const struct sockaddr *) &servaddr,
sizeof(servaddr));
std::this_thread::sleep_for(500ms);
}
}
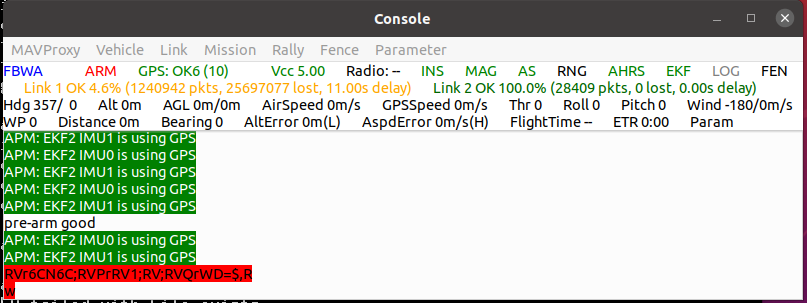
Also in MAVProxy console I got some random chars:

I read this: MAVLink and Arduino: step by step
Instead xxx_pack I use xxx_encode. So I also tried this xxx_pack function, but result is still the same.
In topic mentioned above for send is used SerialMAV.write(buf, len), I use sendto() with UDP, is it good for communicate with SITL?
I found that all msg has function like this (xxx_send):
static inline void mavlink_msg_heartbeat_send(mavlink_channel_t chan, uint8_t type, uint8_t autopilot, uint8_t base_mode, uint32_t custom_mode, uint8_t system_status)
{...}
But how to use this mavlink_channel_t?
#ifndef HAVE_MAVLINK_CHANNEL_T
typedef enum {
MAVLINK_COMM_0,
MAVLINK_COMM_1,
MAVLINK_COMM_2,
MAVLINK_COMM_3
} mavlink_channel_t;
#endif
What am I doing wrong? Can anyone help?