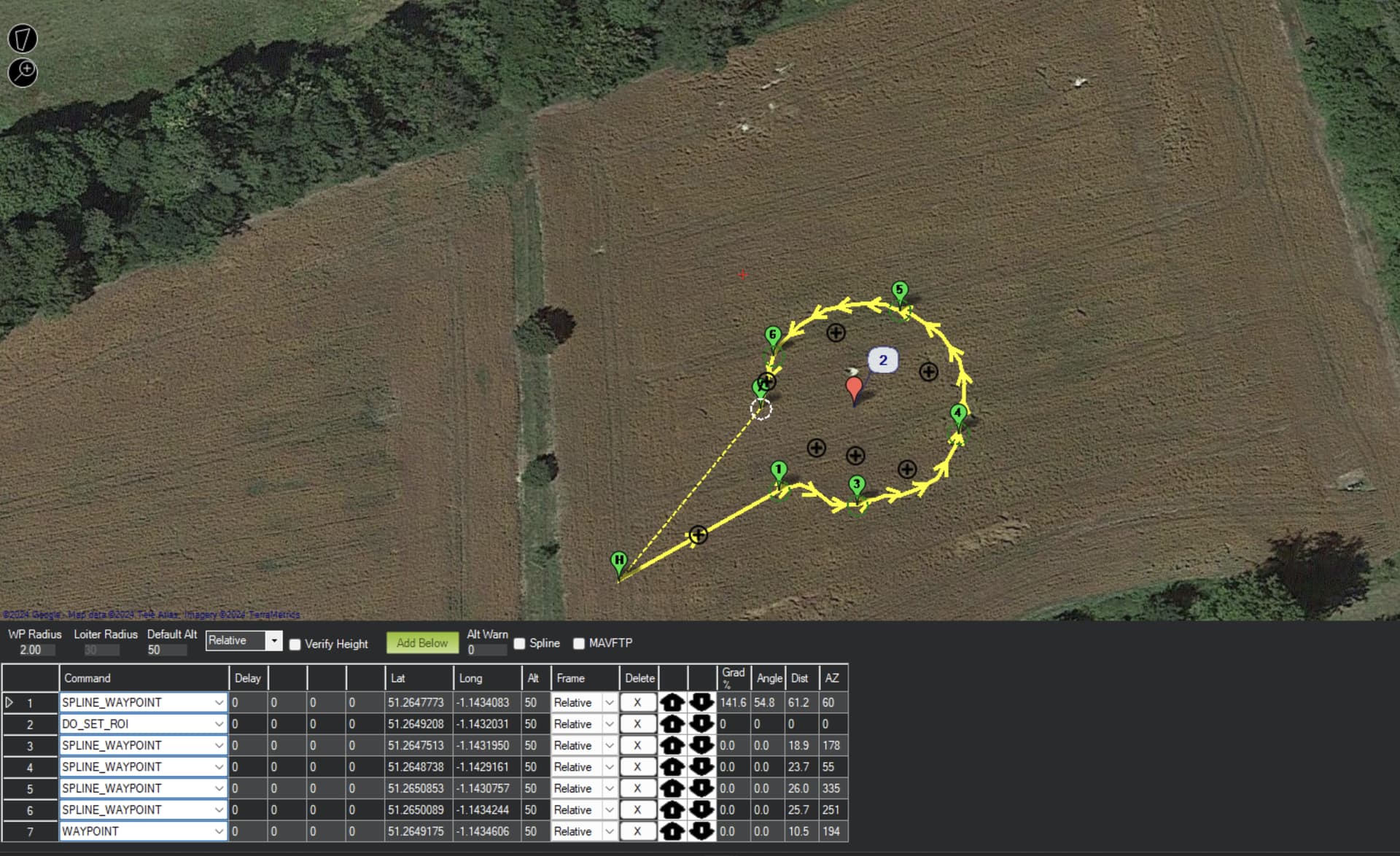
Hi, I was trying to fly drone in auto mode where drone is orbiting the center object and always facing towards it. For this, I tired setting ROI in center and make a waypoints around object as in image. The drone is flying as desired but the gimbal is facing somewhere else and cannot be adjusted manually if ROI has been set. Is there any way to face gimbal to the same point or make gimbal controllable manually while drone is in auto mode? I am using ardupilot 4.3.6.
As you might have guessed already, the gimbal needs to be correctly configured and calibrated, otherwise it won’t work.
Hi @amilcarlucas , thanks for response. I have calibrated the gimbal and if I define the pitch angle in DO_GIMBAL_MANAGER_PITCHYAW, it moves to the desired camera angle, but doesn’t work with ROI enabled. Is there any way to make camera independent in auto mode?