Initiall I thought it is a problem with esc calibration but looks like not.
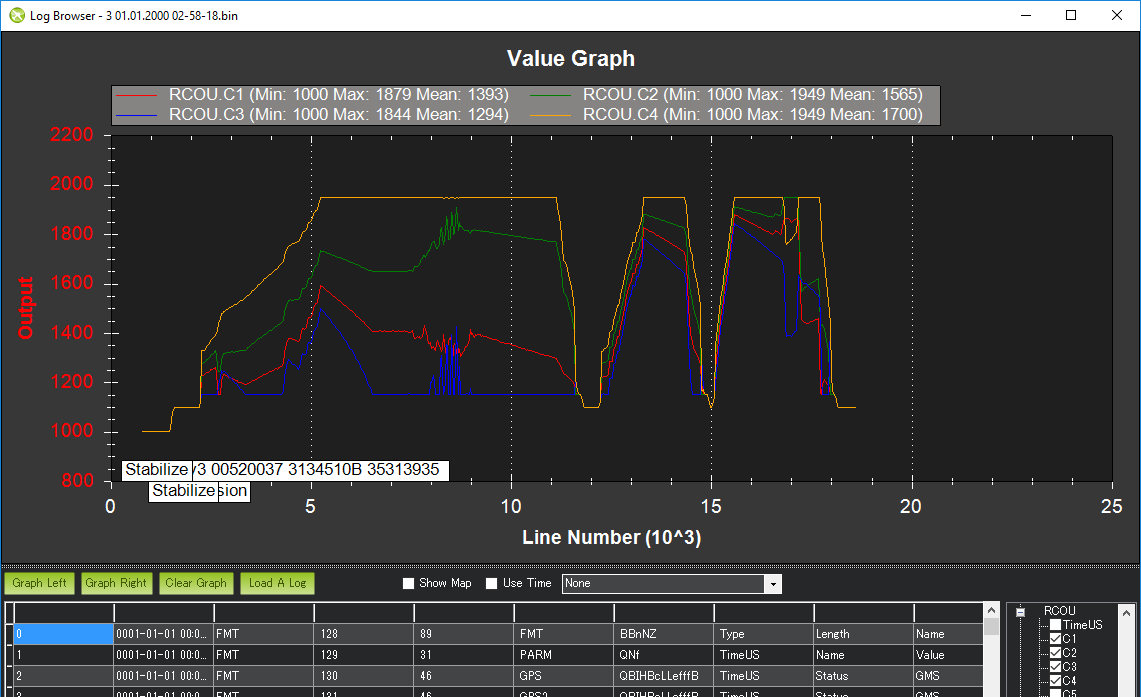
Motor don’t go to full speed (don’t follow thorottle) any idea what parameter is set incorrectly?
Piotr,
Thanks for testing.
At first glance, the issue appears to be a motor imbalance.
Perhaps a propeller is on backwards or a propeller is loose.
It could also happen if the target heading has changed while the vehicle is on the ground.
This is tbs discovery frame. No props and motors are quite new. Only motor 1 is connected do pixhawk. Frame just on table.
Maybe issue is that frame is partially dismounted and it’s not very rigid.
Could this be issue with hardware (pixhawk itself)?
More tests from today, motors disconnected, copter flat on table, flight mode set to acro. No cables over BT.
Same pattern motors far lower than throttle. Any idea?
I think this isn’t really a problem, what you’re seeing is just the attitude controllers trying harder and harder to control their attitude but not being able to. When you put propellers on it and allow it to control it’s attitude you’ll see it acts more like you’d expect.