I have a vibration problem on « VibeZ » with my quadcopter. I have doing many serch, but I cannot solve the problem.
I tested many configurations, at the beginning with RC Timer propellers and last with T-Motor propellers. I have vibrations on datalog and it is confirm by jello on the Gopro.
My configuration:
Quadcopter
Motors Team Black Sheep 400 kv (T-Motor)
ESC T-Motor 40A
Propellers T-Motor carbon fiber 15x5
Battery 6S 10000 mAh
Pixhawk 3DR with damper 3M from 3DR and APM: Copter 3.4.5
Frame in carbon fiber
Can you help at resolve problem please?
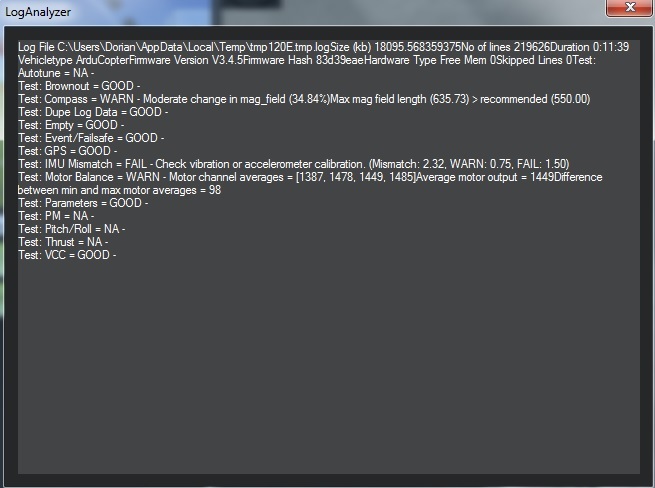
I have attached screen shot, I think what my logs are so big for be upload on forum
It just means that person decided to delete his post .
Often happens, sending to wrong thread, make comment and then reread post a realise the question you ask is answered there, etc.
Logs are pretty much essential for getting anyone to analyse a problem.
If the log is too big, then put it on a google drive, drop box, or any of the other network storage providers out there.
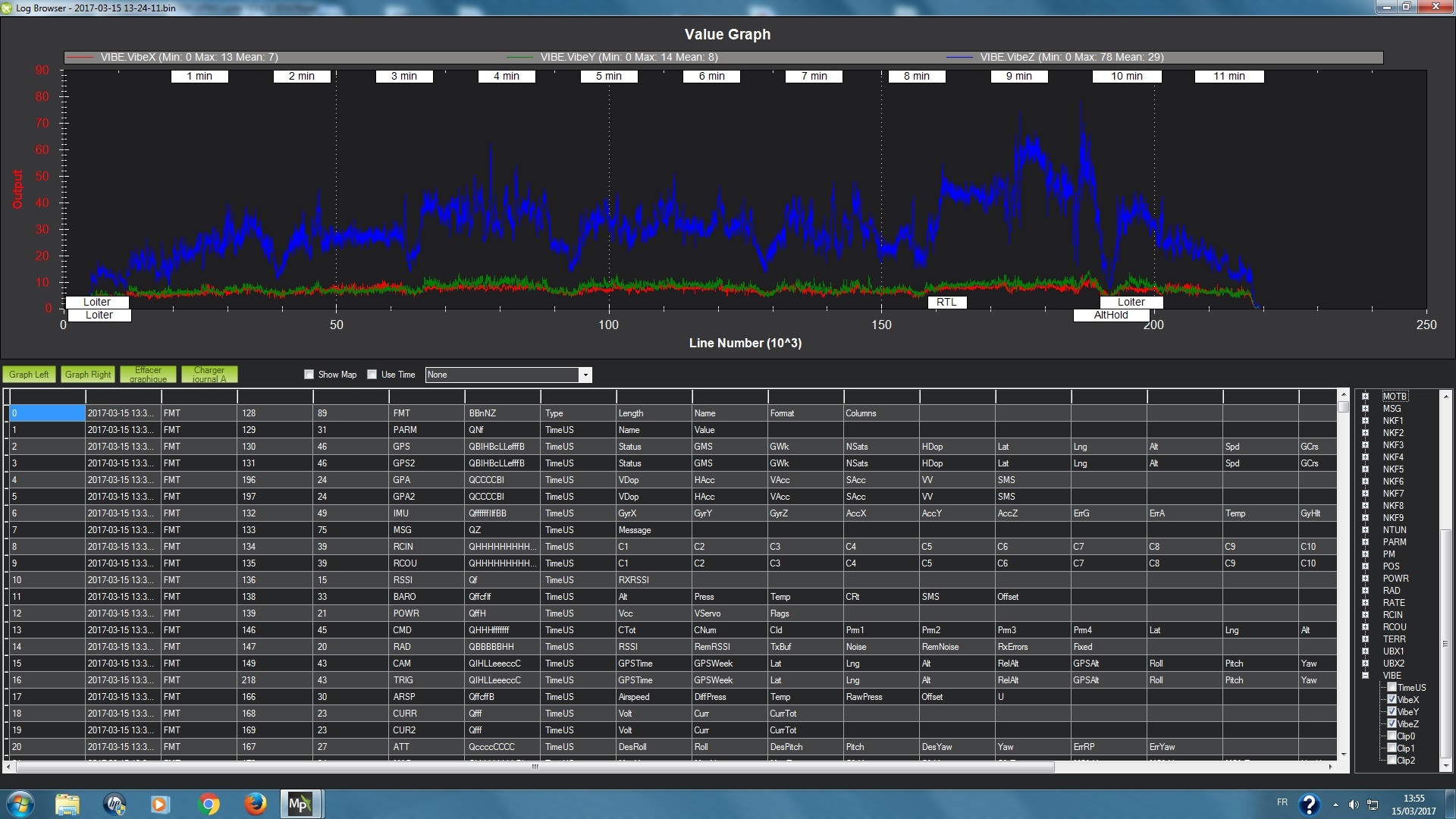
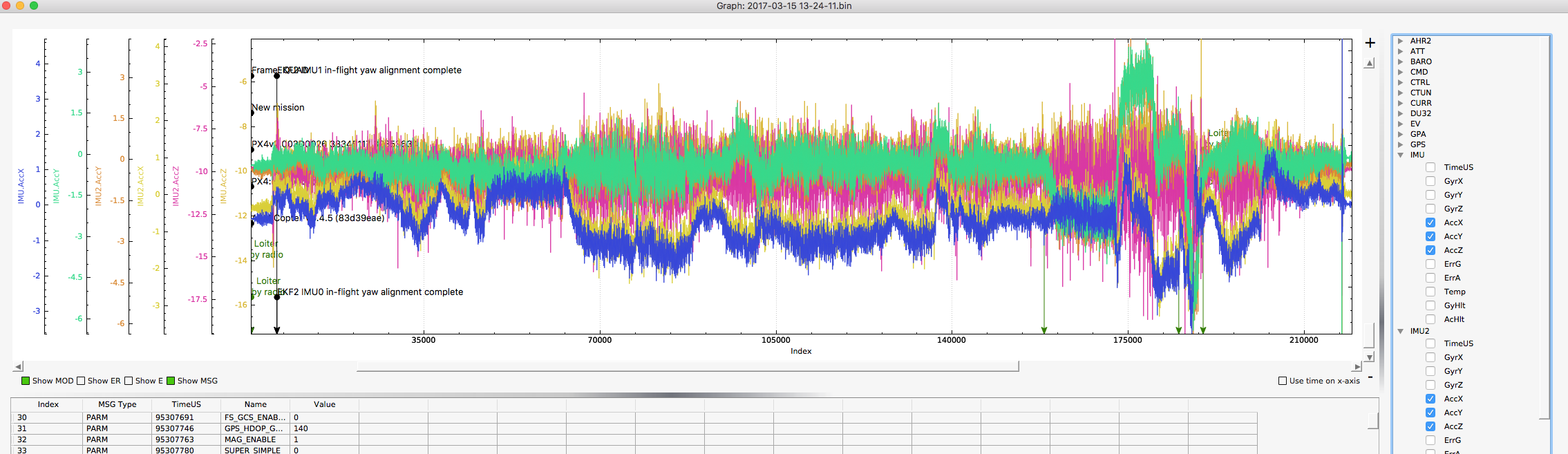
I would like to see specifically the IMU/AccZ graph as I am not sure how the VIBE message is derived.
You have excessive vertical vibration which will screw things up as you have experienced.
You haven’t mentioned flight performance?
Do you have anything touching the Pixhawk, like wires hanging?
Are all the motors aligned horizontally? (check your prop tips line up with the motor next to it)
Anything loose in the frame?
Is the frame flexing? (compare vibration in forward flight to static hover)
The X and Y are good so it is most likely flex induced.
Pls check the prop tips track the same plane (point).
Motor balance warning might be due to CoG.
Move something to the front (battery - 1 cm) and check .
I have controlled my propellers and it is good.
The center of gravity is one centimeter behind le CG ideal.
The frame is enough rigid I think (compared to commercial drone).
I don’t think have problem with wire of Pixhawk (I have attached a photo with the log).
I think what motors are well aligned.
In flight, we see what the drone twitch en few in stabilize flight
This has made me a bit curious about the VIBE/VibeZ graph, as your IMU/AccZ looks very good at +/-1.5 thereabouts, certainly not a problem in most instances.
Are you having performance problems?
Large vibrations in Z should be causing erratic altitude hold as the most obvious symptom.
I have not performances problem except what the drone twitch a few in stabilize flight, but it don’t lose altitude.
The GPS cable appear good, I will change his place for try.
I have problem with the compass variance and I don’t know the reason. At the beginning, I had an external compass and GPS 3DR. I have bought a new external compass and GPS (Drotek brand NEO-M8N for better performance) what I have raised and disable Pixhawk compass internal for try and there are no changes.
I will go do a new flight this week-end (if the weather is good) and do a video for show his behavior.
I tried to find a solution for the compass problem, but I had not find a good result. I had disconnected telemetry and RC receiver and I have do a compass calibration with an USB cable.
I disassembled my camera gimbal, because, I have found a variance with my compass card (video attached).
I had doing a little flight (without gimbal) saturday because the weather condition was not good, many wind. The landing was a little hard. I had report no altitude variation in loiter mode. I have attached a little video what I had do the last week when the camera was installed.
I have attached also the logs of my last flight.
I wonder if my Pixhawk does not have a malfunction.