Hi guys,
I have been using Arduplane for quite some time, but now I really don’t understand the new compass selection setup.
So, I have a Pixhawk 2.1 with a CubeBlack running 4.0.7, it’s installed with a Yaw180 in the plane, “front of the autopilot pointing at the back of the plane”, Normally on it you have an AK8963 and a LSM303D, I installed a Neo V2 GPS equipped with a RM3100 compass via CAN.
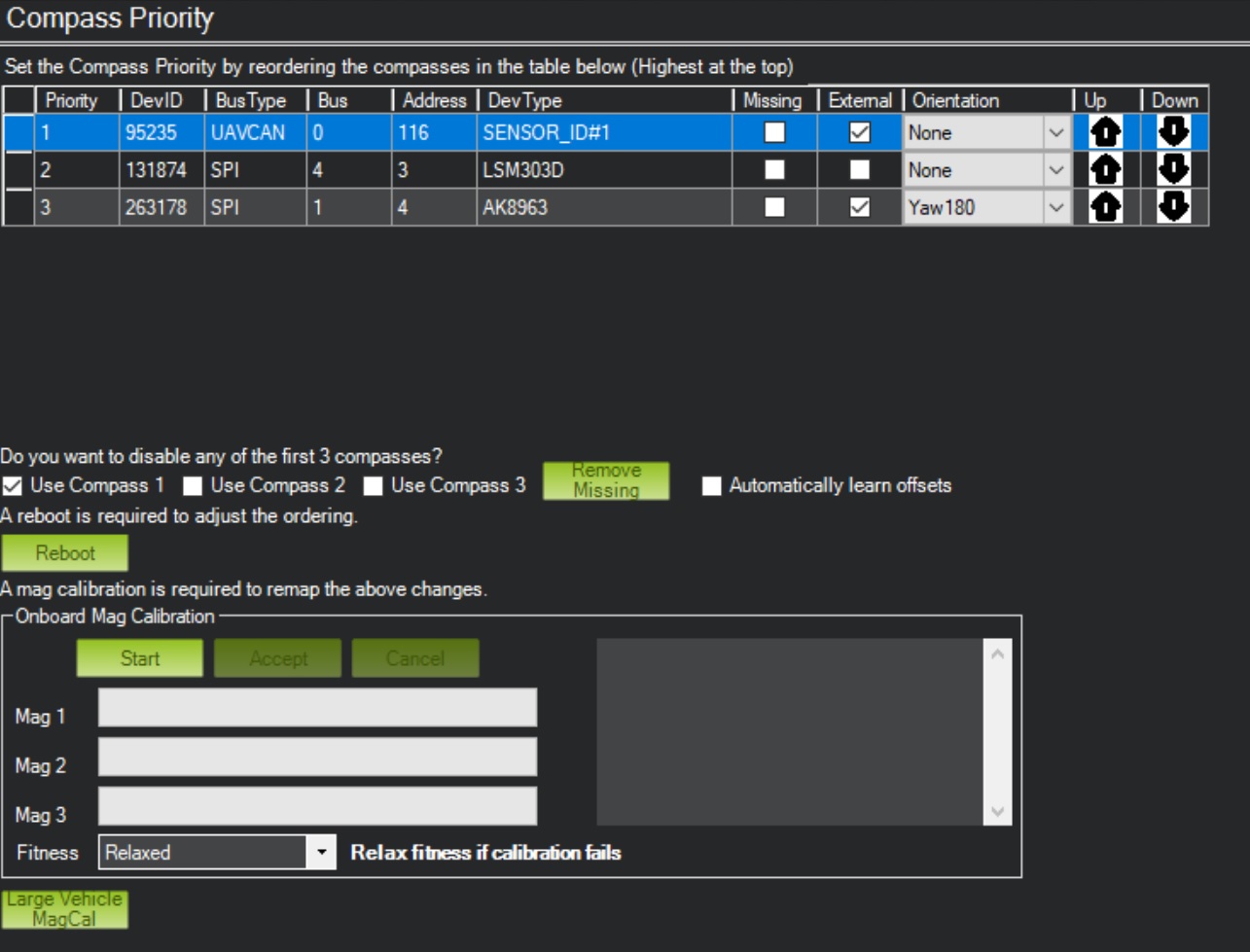
I manually bumped up the RM3100 ID 95235 to first priority and selected only the Compass 1.
But on the parameter the COMPASS_DEV_ID is 263178, the AK8963 and the COMPASS_DEV_ID3 is the RM3100, COMPASS_PRIO1_ID is the RM3100 and COMPASS_PRIO3_ID is the AK8963
So when I select “Use Compass 1” which one is used?
Why is the AK8963 is selected to external, since it’s internal and why can’t I change it to internal via the compass setup screen? Do I need to set COMPASS_EXTERNAL or COMPASS_EXTERN3 to 0?
Also why is the AK8963 with a Yaw180 and not the LSM303D?
Thanks
Benjamin