hi all, I have a f450 drone with 2212 apm2.8 engines, gps 8m, assembled and calibrated everything without problems with MP 1.3.62 it worked well for months, however after a fall from a standstill with the battery disconnected it no longer wants to know about fly well, rotate left every time. I replaced esc and motors in various tests, configured everything with MP 1.3.62 several times but it continues to fly badly. it seems that APM does not give the same PWM input to the motors, 1 and 2 good 3 and 4 much lower, in fact 1 and 2 heat up and 3 and 4 don’t. the weight is well balanced, esc calibration ok, gps and compass ok, engine rotation and direction ok, what could be the problem? it seems that APM is busting the PWM outputs. both on the ground and in the air, nothing changes. I’ve read that there is a lot of discussion about min max trim parameters etc but doing the normal wizard already automatically configures everything so I don’t think it’s a parameter problem. apm2.8 ver 3.2.1 MP 1.3.62.
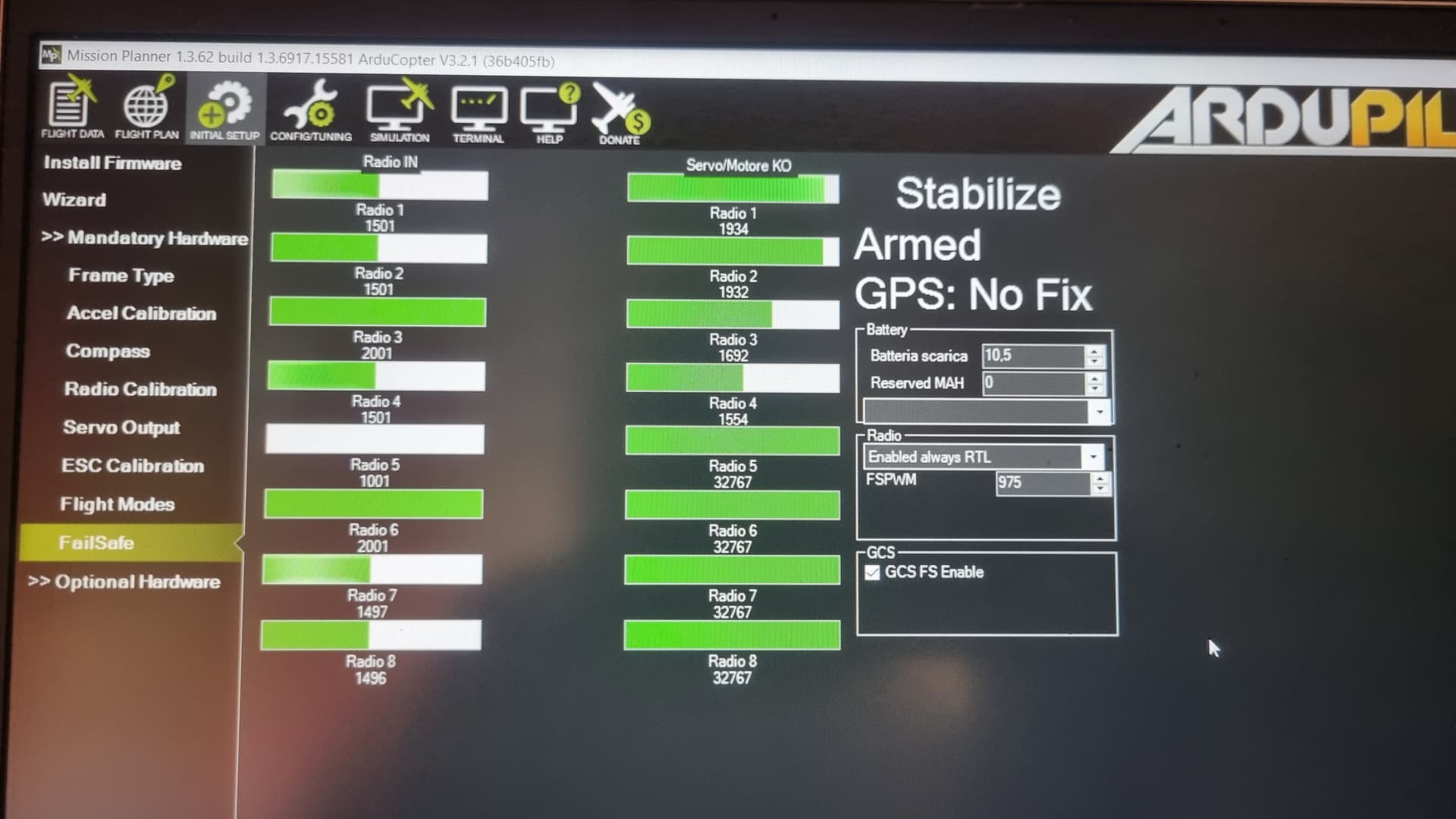
i know its very old but it worked great and always worked great until a few days ago. can it be that in the trivial fall the internal sensors of the apm have been calibrated? can they be reset? when I reset default apm are all the parameters deleted or are some parameters left written? is the apm broken in your opinion? in flight or not in flight the pwm outputs ch1 and ch2 are approximately 1993 while ch3 and ch4 are approximately 1650 at full throttle. I replaced one motor again with a 2212 motor but not of the same brand as the others 3. esc calibration ok radio calibration ok compass ok. can this cause problems?
both on bench and in flight I always have the same imbalance.
i tested the motors one by one on a scale and they produce the same thrust, so it’s Apm that gives pwm plus others on 1 and 2 lower on 3 and 4.
help me understand I have read all your disucussioni, has anyone already had this problem?
it worked very well, then it fell violently to the ground from a 1 meter high table with no propellers and no battery connected, it seemed like nothing, but in flight I have that kind of imbalance.
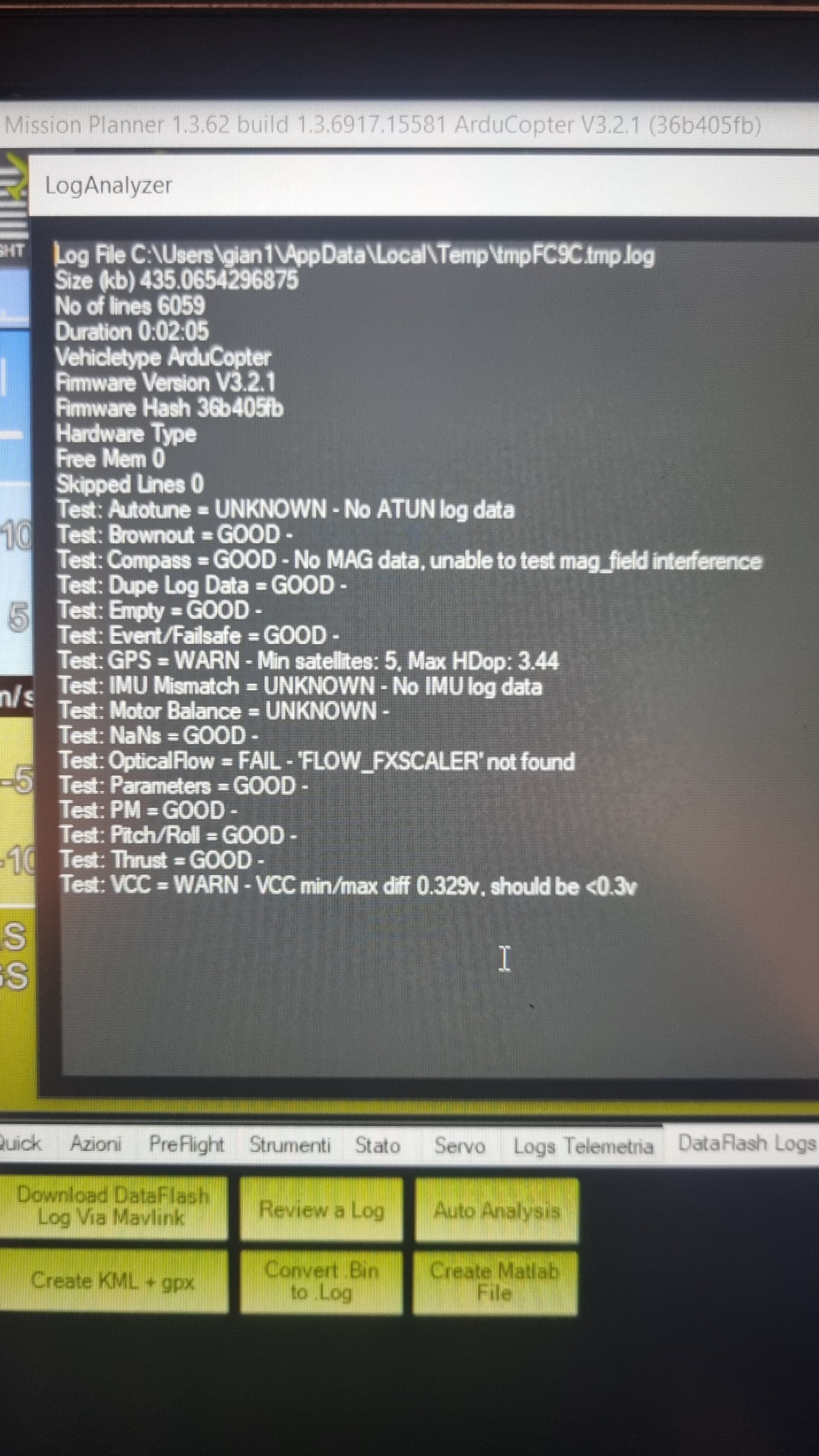
is there a way to test the sensors?
it is clear that the engines, esc, compass, gps are ok, so all that remains is to think about the faulty apm?
a trivial question. What does apm use to hold yaw center?
I remember that by commanding the yaw from the radio control the quadcopter remained perfectly still in the direction in which I turned it. now it drifts slightly left yaw which I manually correct with right yaw.
or is it the motors that, all turning at the same power, keep the quadcopter straight? without turning it?
the problem is the same both in stabilize and the loiter tends slightly yaw to sisitra. but engines 1 and 2 very hot 3 and 4 cold so it’s a clear failure. if apm gives less pwm to more than 1 and 2 consequently 3 and 4 have to accelerate more to compensate, this happens, however it is apm that busts. Is there any test for this?