Hello all
Sorry i found a new problem
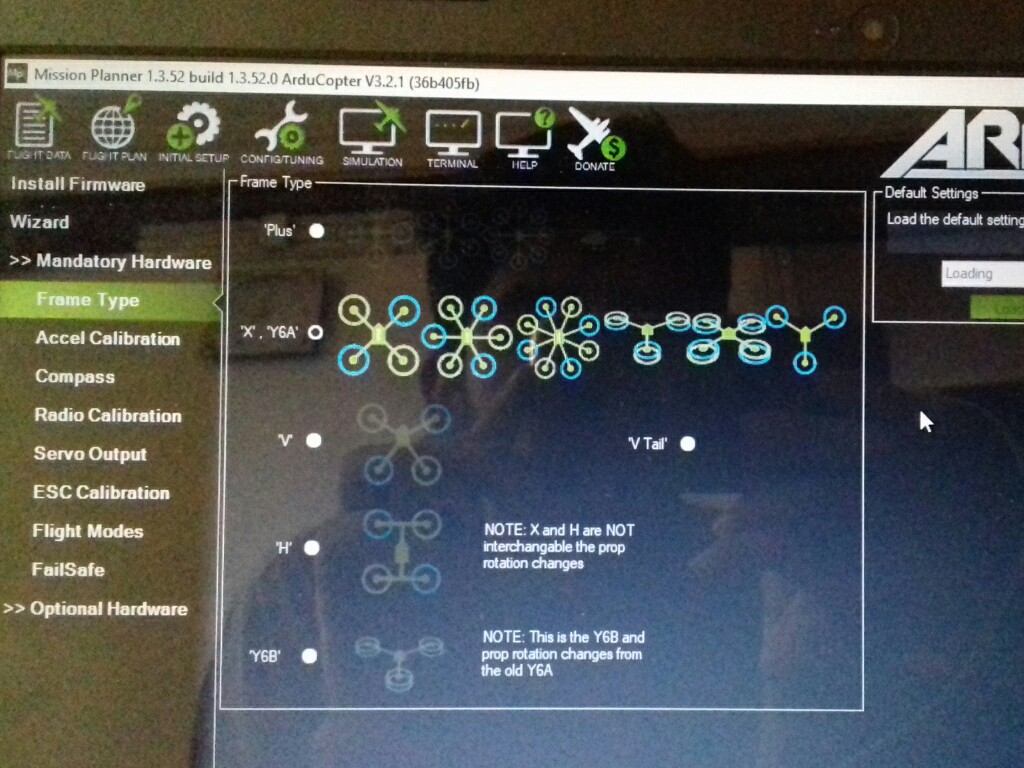
I am in Quad type settings in mission planer ,Put it on Quad X set it up…
But when I work with radio control , It works like Quad Plus + …
Where do you think the problem is …
Thanks you very much…
Reza

Not sure what you mean.
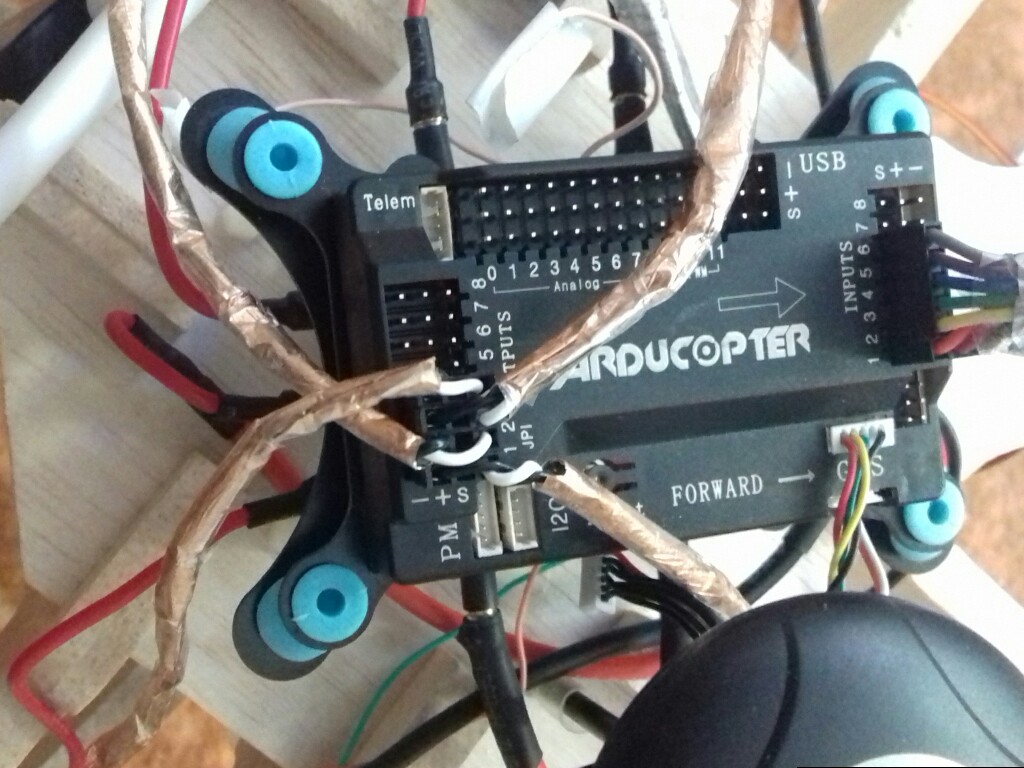
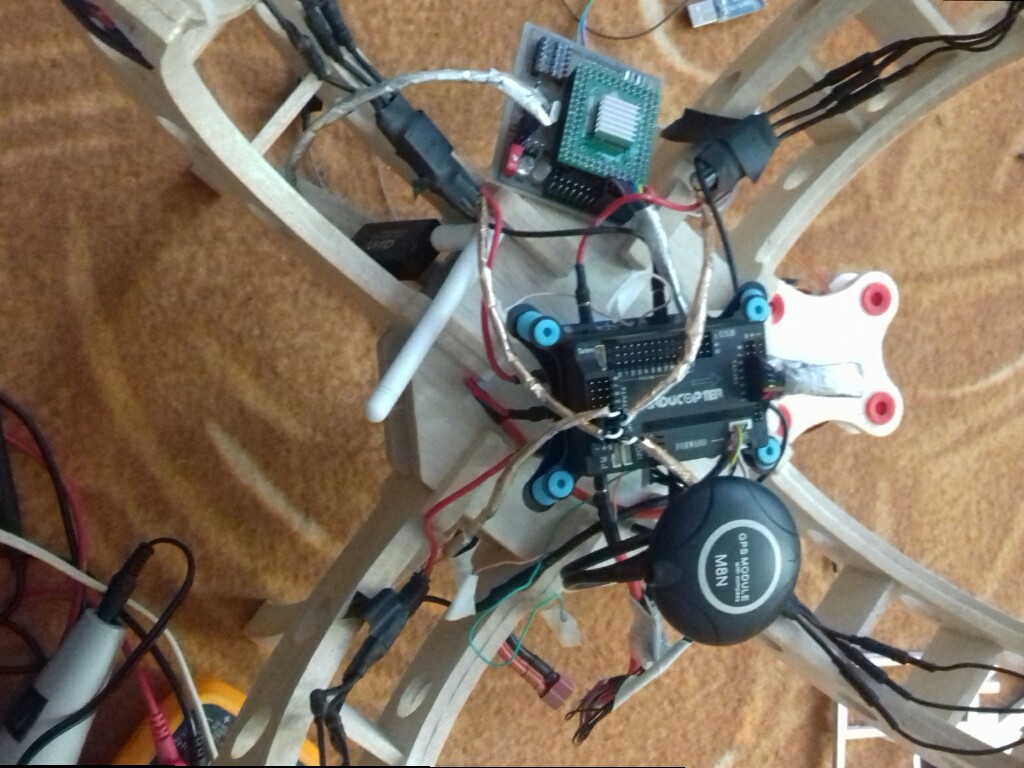
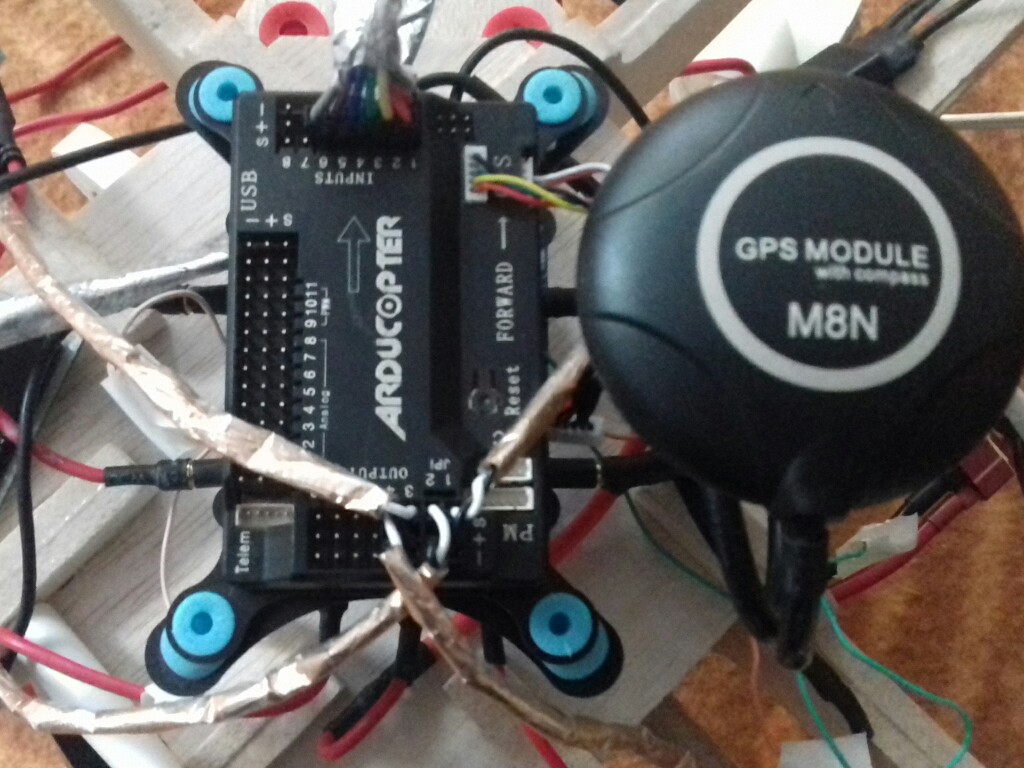
Do you have the flight controller oriented correctly on the frame?
For an “X” the Flight controller should be placed with the flight controller’s forward arrow pointing to a position in the middle of the two front motors.
For a “+” it would point directly at the front motor.
See Here:
http://ardupilot.org/copter/docs/frame-type-configuration.html
Joe
1 Like
Hello again, dear friend
I did the settings, frame type, and frame class from this page…
And then on the motor test page,I tested the motor number with below page, it was all right,
but…
But when I actually fly to Quad , It works like Quad Plus’’+’’ ,While my quad is ‘‘X’’ ,
For example, when I want Quad to go forward, instead of having two upper arm up , one arm is raised , For the rest of the directions ,I have this problem too…
Thank you very much
reza
Take a look here:
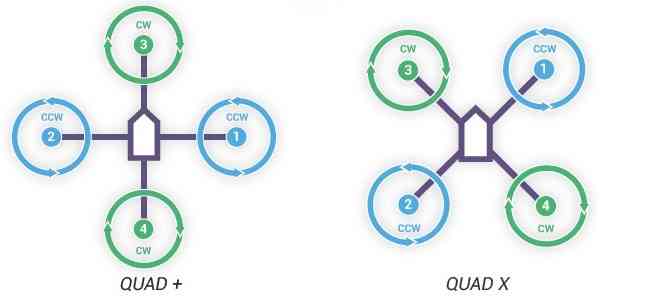
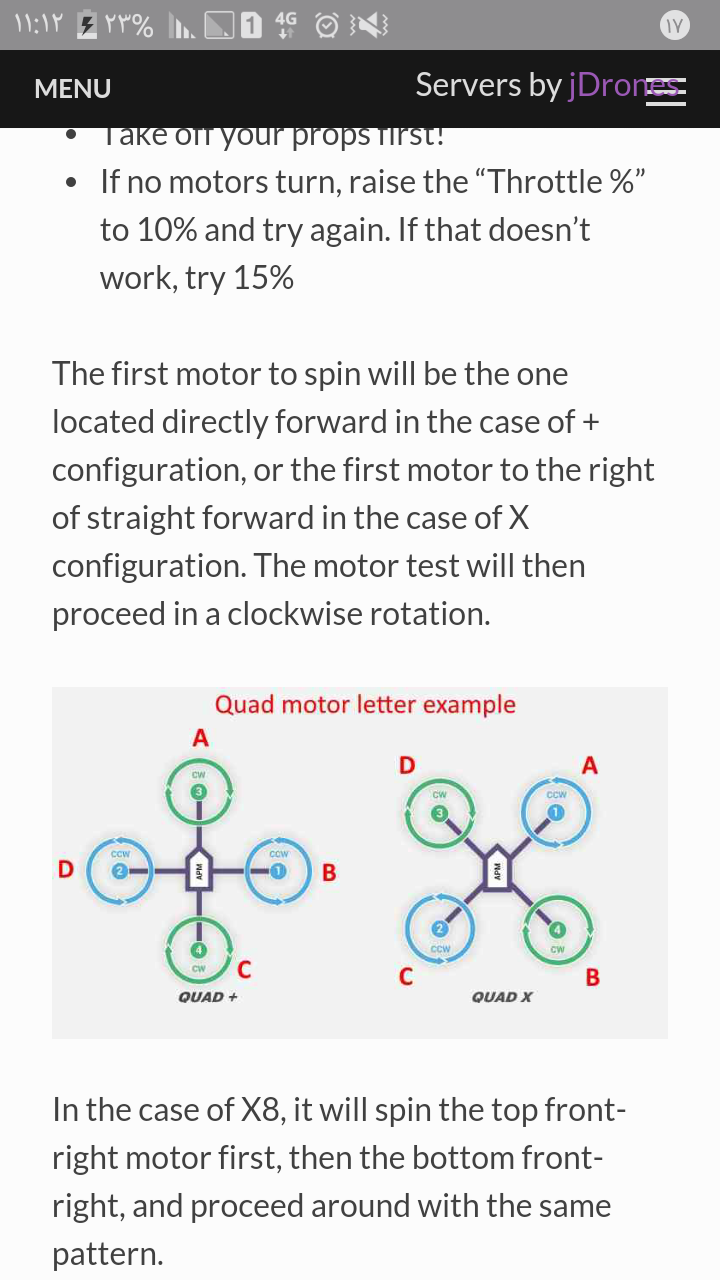
If flight controller is facing with arrow pointing between motors marked 3 and 1, then check your wiring to the FC as the numbers in the CIRCLES are the numbers that should be followed in connection to the FC pins.
In the “motor test” picture the motors actually run 1,4,2,3 motor order. Sometimes people hook up the wiring thinking motor A goes to=Pin1, motor B goes to Pin2 and so on from looking at that “motor test” picture.
Look at this section for connections to FC :
http://ardupilot.org/copter/docs/common-pixhawk-wiring-and-quick-start.html
Did you change any other settings from the default?
You are using 3.2.1- What king of FC do you have? APM or Pixhawk?
I am guessing an APM. I know that there have been some changes in setting up in mission planner since APM was the only choice. Something to do with a Frame Type setting. Been too long to remember things as I haven’t changed my APM board settings for a long time. Your photo looks like you have correct settings chosen, but maybe something in Mission Planner didn’t work correctly.
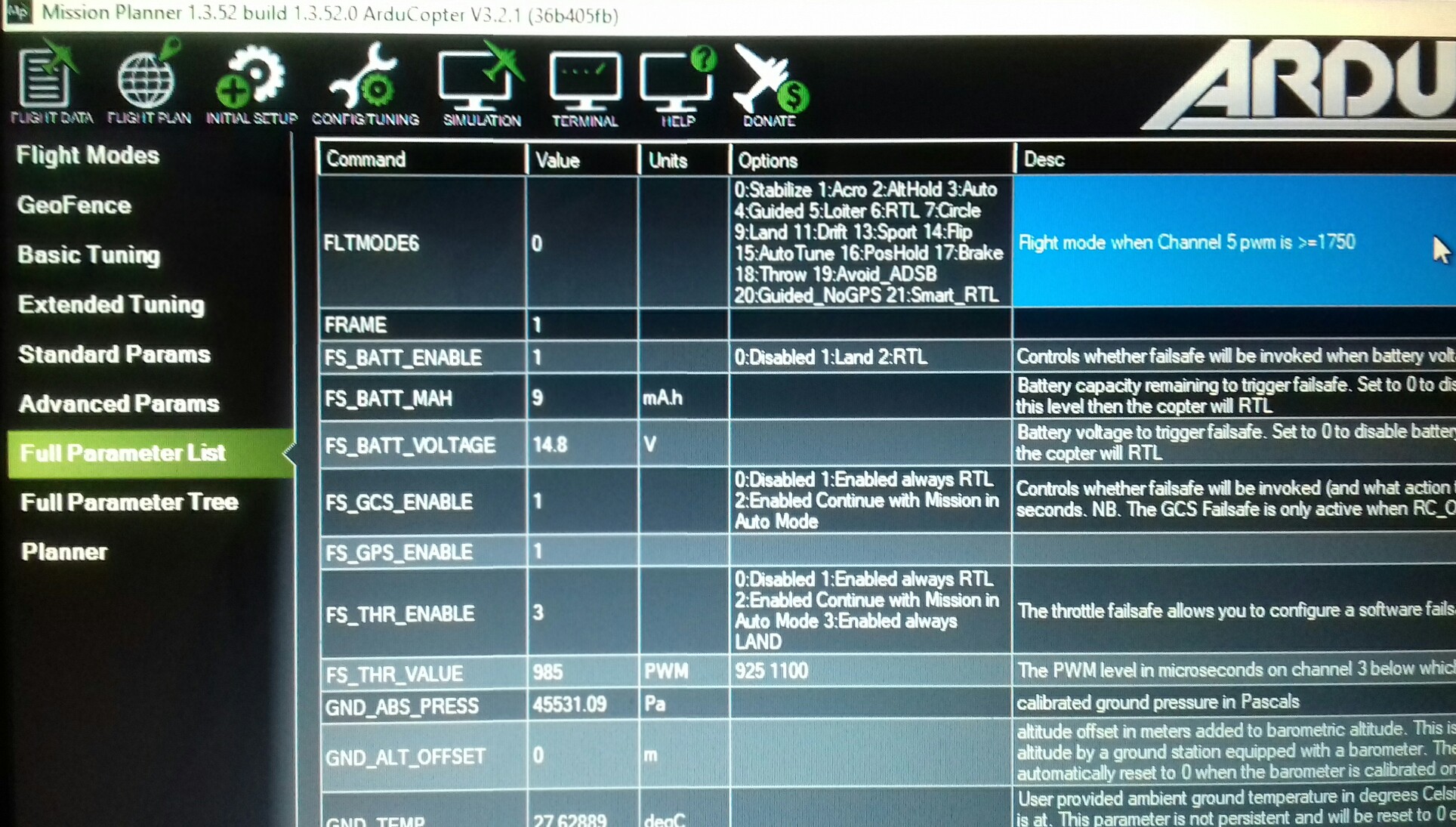
Can you see the Full Parameters list in mission planner? That is the only other place I can think of check to verify that the Frame setting is correct. If all is correct with your FC position and wiring, I can check my APM settings against yours to see.
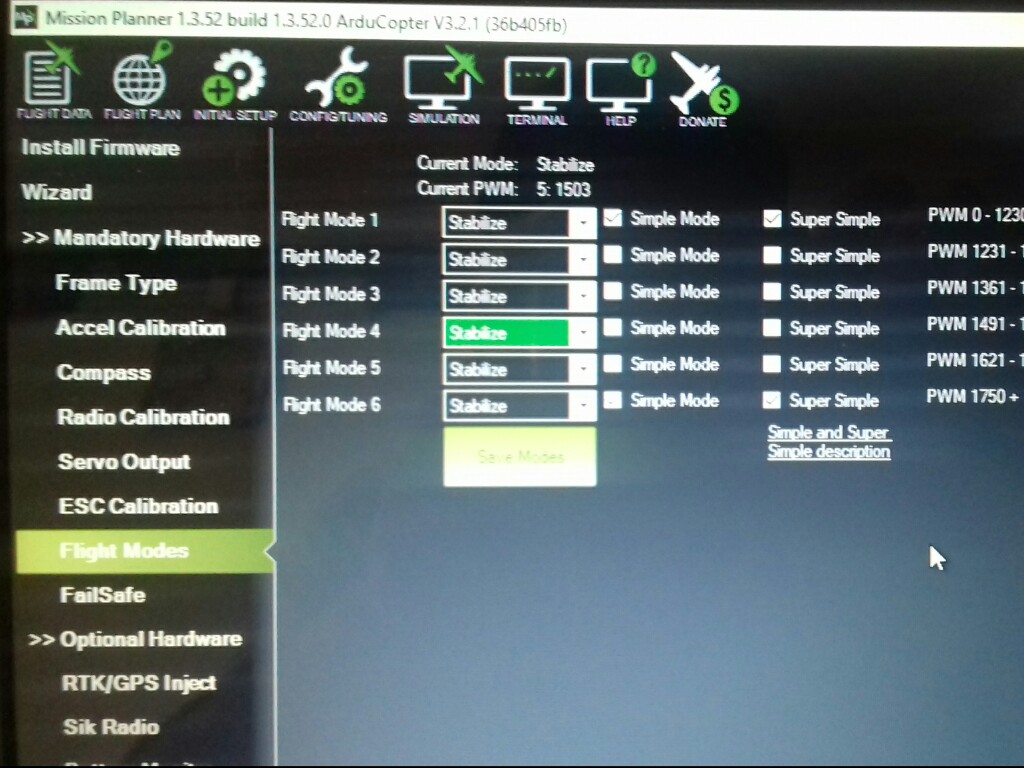
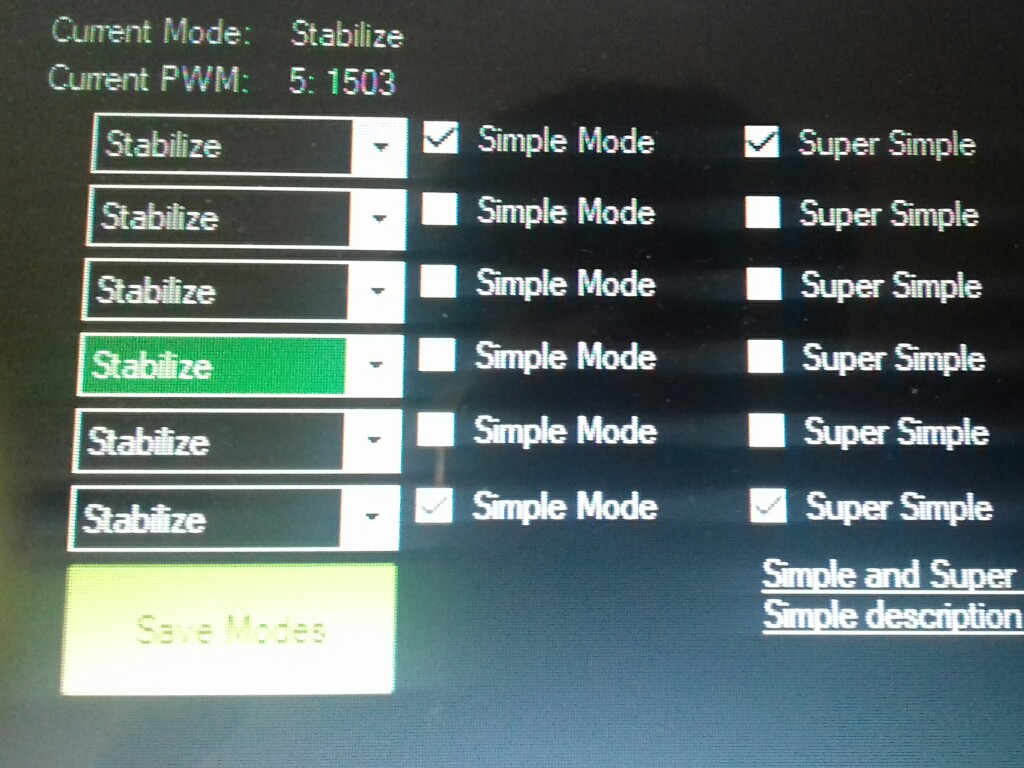
Also what flight mode are you using. You are not in “Simple” mode" are you?
Joe
2 Likes
But about the message you gave , I must say that…
I also checked the wiring of ESCs ,According to the number of CIRCLES .
Also with the “motor test”, I tested the motors,And the a, b, c, d motors were operated according to the number 1,4,2,3 .
I also do not think I’ve played anything with the settings.
Your guess is correct , my FC is APM2.8 .
Enable 958 on the logging and do a short flight.Then download the log and post it here.
The frame and FC are set up correctly for an X so it’s something else.
1 Like
First: If the flight mode you use is the first choice in the boxes when flying, Uncheck the “Simple” and “Super Simple” flight modes in all modes, hit “Save Modes”, reboot, and see what happens. If your radio only has the Flight mode defaulting to what’s shown in green " Flight Mode 4" , then the 4th choice should be OK. That is - without “Simple” and “Super Simple” being engaged. But try this first.
As Jagger says, send a BIN log. You will only need a short flight. A few seconds will do. You can put the 958 LOG setting into the Full Parameters list and " write" them as the Wiki page shows an older version of MP for that screen and I think it has changed from that picture.
See:
http://ardupilot.org/copter/docs/common-downloading-and-analyzing-data-logs-in-mission-planner.html
From you photos, there appears to have been Parameter changes from the default ones, at lease the Battery Failsafe settings. That should not cause this problem and can be fixed later.
What battery are you using; 3 or 4 cell? What Capacity?
Also, have you tried to re load 3.2 and re-do the setup?
Sometimes loading software for another vehicle, say Rover, rebooting the board, then re-loading Copter and doing the set-up from the beginning will clear out a lot of odd settings that may have gotten in. There is a button in MP that will re-set things to default as well, but it wouldn’t harm anything to clear settings this way. I have had many an odd problem fixed by doing this-even when MP says all is OK.
Joe
1 Like
1 12-31-1969 4-00-00 PM.bin (103.1 KB)
1 12-31-1969 4-00-00 PM.bin.log (201.4 KB)
2 12-31-1969 4-00-00 PM.bin (73.2 KB)
2 12-31-1969 4-00-00 PM.bin.log (140.2 KB)