I did the test with leads swapped without external battery supply. I have proved the mRo GPS/compass is working by connecting it to the Mini Pix without external battery.
Since I started this thread I have seen other discussions, in this forum and others, about I2C problems with the R15 board, going back to 2015. One solution I read was to ‘reset the board to original settings’ and then re-flash the Arducopter firmware. I can’t see how to reset to original settings, so instead I flashed v4.1.1 quadcopter firmware, and then re-flashed with 4.1.0 heli firmware. External compass is still not recognised.
Just checked with external power and SDA/SCL leads reversed, but external compass is still not recognised, same as when I did it with the leads right way round earlier.
It’s Copter 4.1.0 OFFICIAL that I’m using. Yesterday I flashed the quadcopter version, but external compass still not found, so I flashed back to the heli version.
One related question I’ve got: When I go to flash new firmware it asks me to select between Pixracer, Pixracer-bdshot, and Ignore. I’ve been selecting Pixracer each time, is that correct?
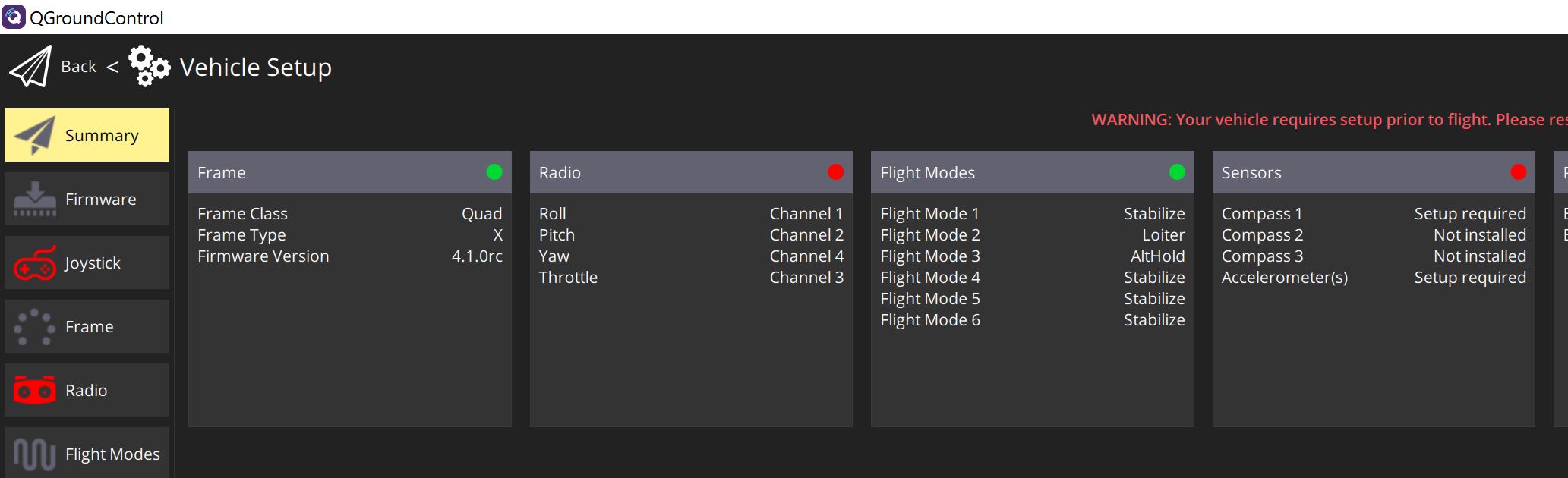
I’ve used QGroundControl to install the PX4 Flight Stack, but I can’t figure out how to view the compasses. After I’ve congifures the R15 as a regular hexcopter, and gone throught the compass calibration routine, QGC just tells me Compass0 is ok, but doesn’t tell me how many it’s detected. And MP’s Setup > Mandatory Hardware > Compass screen now doesn’t show any compasses!
To my untrained eye this looks worse than before – only one compass showing in QGC. Shouldn’t I be seeing at least the two onboard ones that MP detected In the map on the initial screen the GPS location is correct, and the paper dart icon rotates in the correct direction when the R15 board is rotated, but it doesn’t rotate if only the GPS module is rotated.
How right you are! Royal Mail/USPS tracking told me my R15 arrived at mRo yesterday (13 days from mailing) so I emailed them to say it was with them. They emailed back to say it’s already repaired and is on its way back by Fedex, due tomorrow! Wonderful service!
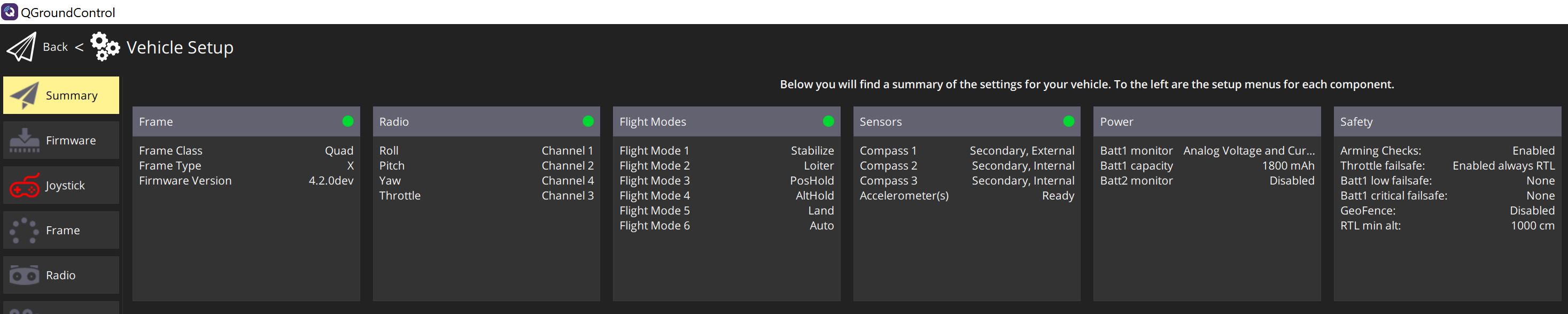
Received it back today, and all 3 compasses are recognised Am I right in thinking that it’s best to use only the external compass, to avoid any possibility of conflict between them? The GPS module will be mounted on the tail boom, so further away from the motor etc.
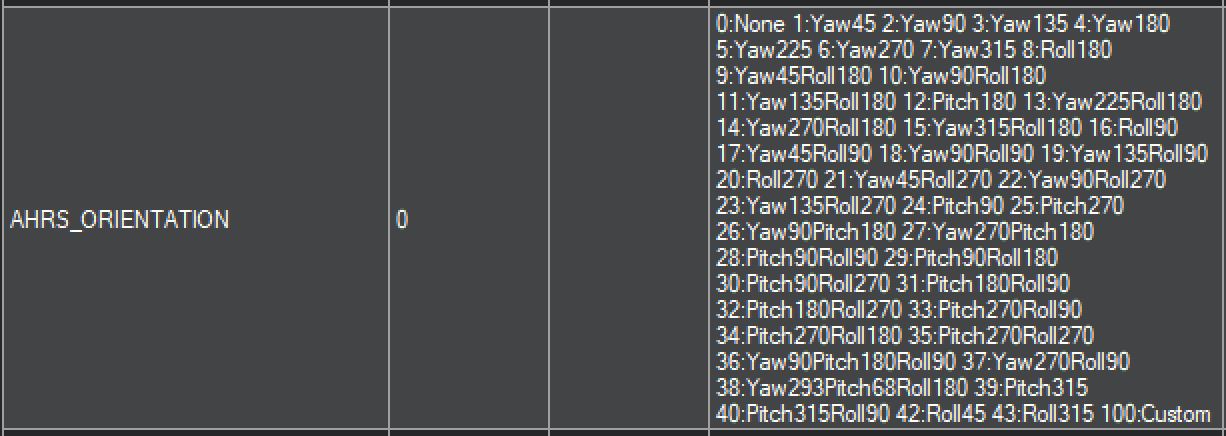
Thanks Dave. Now one final question (in this thread ); my board in its enclosure is 1mm wider than my heli frame, so the simplest way to install it would be on the side frame instead of between the frames. MP doesn’t seem to recognise any orientation than right side up, facing forwards. But if I go to QGC there seems to be the ability to mount it in any orientation. “Roll 90” seems to be what I want, so long as the arrow is still facing forward. My GPS with compass will be right way up. Is that going to work, and will MP (which I’m now accustomed to) recognise it once I’ve recalibrated the accelerometer?
OK, why didn’t I think of “AHRS” I’m learning all the while. Thank you. I’m sure I’ll be back with other questions, in new threads, once I get into the build.
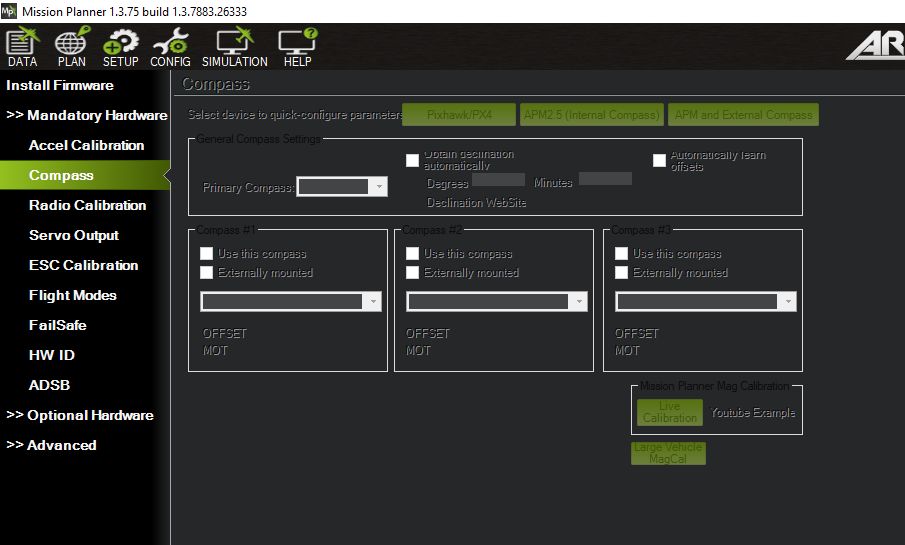
 In the map on the initial screen the GPS location is correct, and the paper dart icon rotates in the correct direction when the R15 board is rotated, but it doesn’t rotate if only the GPS module is rotated.
In the map on the initial screen the GPS location is correct, and the paper dart icon rotates in the correct direction when the R15 board is rotated, but it doesn’t rotate if only the GPS module is rotated.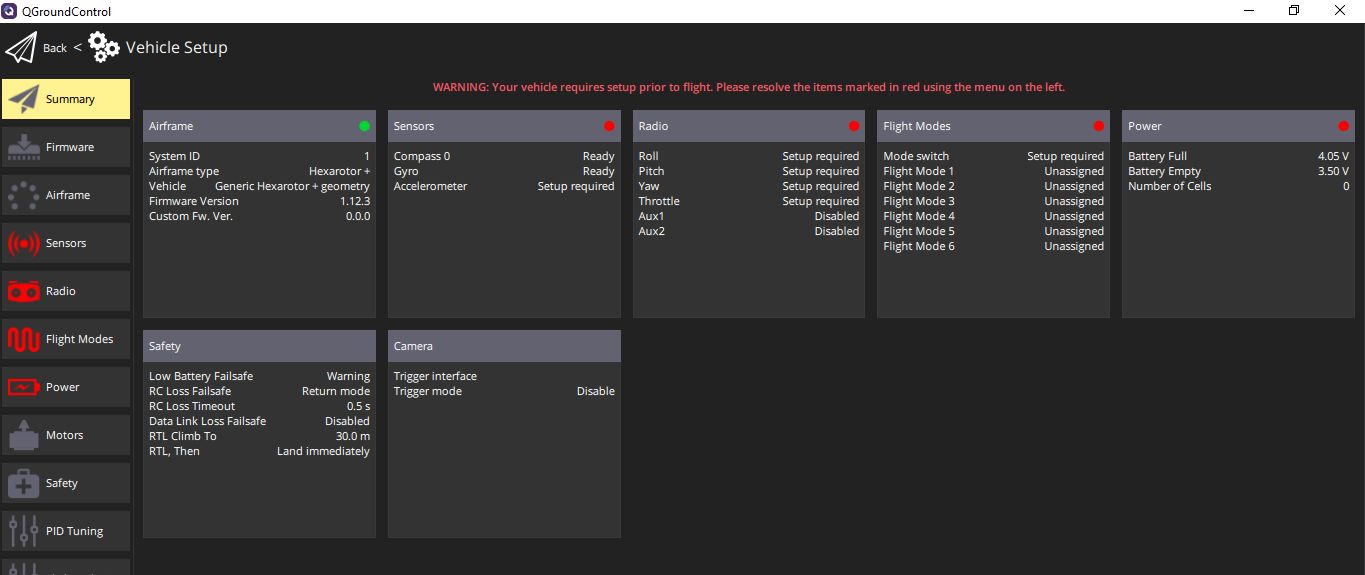
 Am I right in thinking that it’s best to use only the external compass, to avoid any possibility of conflict between them? The GPS module will be mounted on the tail boom, so further away from the motor etc.
Am I right in thinking that it’s best to use only the external compass, to avoid any possibility of conflict between them? The GPS module will be mounted on the tail boom, so further away from the motor etc. ); my board in its enclosure is 1mm wider than my heli frame, so the simplest way to install it would be on the side frame instead of between the frames. MP doesn’t seem to recognise any orientation than right side up, facing forwards. But if I go to QGC there seems to be the ability to mount it in any orientation. “Roll 90” seems to be what I want, so long as the arrow is still facing forward. My GPS with compass will be right way up. Is that going to work, and will MP (which I’m now accustomed to) recognise it once I’ve recalibrated the accelerometer?
); my board in its enclosure is 1mm wider than my heli frame, so the simplest way to install it would be on the side frame instead of between the frames. MP doesn’t seem to recognise any orientation than right side up, facing forwards. But if I go to QGC there seems to be the ability to mount it in any orientation. “Roll 90” seems to be what I want, so long as the arrow is still facing forward. My GPS with compass will be right way up. Is that going to work, and will MP (which I’m now accustomed to) recognise it once I’ve recalibrated the accelerometer?