Hallo Felix,
so nun komm ich dazu. Nochmals danke fürs Kümmern!
ein 800er ist ja schon mal eine amtliche Größe, sehr gut!
Das Tandem-Projekt betreibe ich seit fast 10 Jahren und habe mir fast alles selber beigebracht ( und weiß auch alles…), damals gabs das noch nicht so richtig. Die Mechanik ist eine Eigenkonstruktion mit Riemenantrieb.
Mein neuester Clou sind die Rotorköpfe. Sie sind auch eine Konstruktion von mir, sie sind in Größe, Design und Funktion absolut vorbildgetreu und - 3D-Druck im Laser-Sinter-Verfahren. Das ist absolut neu, bin ich vermutlich der erste und einzige mit.
Wenn Du die ROTOR liest, kennst Du meinen Bericht darüber, sonst sende ich ihn Dir noch mal zu.
Wie kam ich auf Flightcontroller?
Das Teil fliegt mit dem bisherigen FBL (Bavarian Demon 3SX) absolut super, ist auch das einzige mit Tandem-Programm.
-
mein Wunsch war, den Tandem mit GPS “in die Luft zu stellen”, um Heckklappe, Seilwinde usw. in Ruhe zu bedienen. Leider ist für das 3SX trotz Ankündigung keine GPS-Ergänzung in Sicht.
-
dachte ich schon immer, dass der Tandem doch auch mit einer quadrocoptersteuerung zu fliegen sein müsste. Der Tandem wird ja über je 2 Servos vorn und hinten angeteuert. Und die machen das gleiche, wie die vier Motoren von einem quadcop, auch von der Charakeristik her.
Habe ich mit DJI naza-M probiert - und geht.
Aber das kann ja nur Motoren ansteuern. ich brauchte etwas, um statt der vier Motoren vier Servos mit den üblichen Einstellmöglichkeiten (Mitte, revese, Wege usw.) anzusteuern.
So kam ich durch Hinweis von einem Freund auf FC. Und da MP mit Pixhawk.4 mini.
Und da im Programm habe ich gesehen, dass der ja auch eine Tandemsteuerung hat (Heli-Dual, Frame class 11). Damit war die Sache eindeutig. Vom Prinzip funktioniert das auch super.
ich hatte zunächst die FW stable 3.6.11 drauf. Die ging auch im Prinzip, aber das armen war immer ein Problem und dazu kam “PreArm motor interlock enable”, was durch nichts wegzukriegen war (wirklich alles probiert).Und es ging nur bei acro und stable. Bei allen Modi mit althold gingen die Taumelscheiben auf Anschlag runter und waren durch nichts zu beeinflussen. Wieder alles probiert (mit Bill) - nichts.
Bei meinem Freund ging alles, er hatte aber auch auch die neuste FW (latest) 4.0.0 drauf.
Ich also auch - und es ging alles! armen kein problem, interlock nicht aktiv, keinerlei Fehlermeldungen.
Auf der Werkbank war alles so, wie es typischeweise sein sollte, auch althold.
Ich hatte einmal kurz Gelegenheit, damit auch zu fliegen - vom Ansatz, wie es sein sollte. Jetzt fehlen aber natürlich noch die richtigen PID-Einstellungen.
Aber nun kriege ich keine Verbindung mehr zum MP. Ich habe vielfach alles versucht (natürlich auch Deine Tips) - aber nichts. Port, Baud usw. alles ok. anderer PC, andere Kabel, anderer USB - nichts geht mehr.
Andere FW aufspielen geht manchmal nach mehreren Versuchen, aber dann auch keine Verbindung.
Bei beiden (connecten, neue FW) kommt immer diese Fehlermeldung:
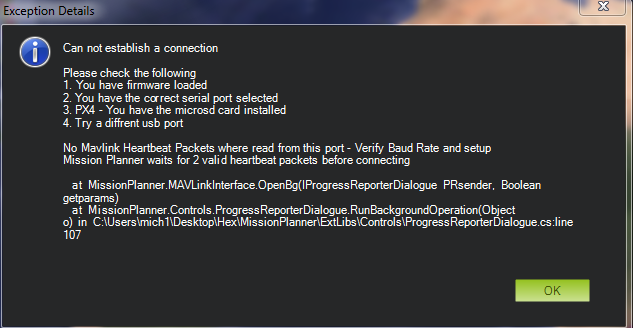
In den verschiedenen Foren habe die Leute offenbar öfter das gleiche Problem, allerdings ohne brauchbare Lösungen. (bei Interlock übrigns auch).
Kann es sein, dass einfach der pix kaputt ist? 3 Wochen alt, und vorher ging ja auch alles.
Wenn Du da eine Lösung hast, bist Du der Größte !!
Und nochmal zu den arming-Sachen.
Ardu und MP ist ja offensichtlich zuerst und hauptsächjlich für Copter entwickelt. Bei dem machen die ganzen arming-Sachen ja auch Sinn, weil ja alles nur über laufende Motoren geht.
Beim Hubi passiert ja nichts, solange ich nicht bewusst den Motor einschalte. deshalb brauche ich diese ganze “Sicherheiten” nicht.
Deshalb wäre es mir am liebsten, wenn man alle arming-Sachen im Menue ausschalten könnte.
(mit nur einmal armen bei 4.0.0 könnte ich ja noch leben…)
Über Anschluss des Reglers an den FC könnte man nachdenken, da müsstest Du mir dann genau das Vorgehen beschreiben.
Bei einigen neueren FBL’s kann man den Regler auch daran anchließen. Das hat aber wohl weniger mit Sicherheit zu tun, als die direktere und schnellere Regelung im FBL bei z.B. Lastwechseln.
Ich würde ja auch gern ein FC-Fan werden. Aber wenn ich mit dem Laptop auf der Wiese bin und keine Verbindung kriege, wird das nichts!
Also erstmal viele Grüße aus Hamburg - woher kommst Du?
Holger