I will make my first ardurover (may be solar). For the mechanical aspect I think I can manage. On the other hand, electronics are more complicated. Therefore, I have a few fairly general questions:
1 ==> I have a ZED-F9P from ardusimple, can I use it for my rover? Can it even take two?
You can absolutely use the ArdusimpleRTK2B F9P module. In my opinion, it is one of the best choices.
You do not need a Raspberry Pi. Mission planning is done on a PC running Mission Planner. The missions are run on a “flight controller”. There are quite a few choices of flight controllers. One of the best is the Pixhawk Cube Orange. If you are on a budget, one of the lower cost ones, such as a Pixhawk 2.4.8, will work fine also. I highly recommend that you chose a controller with 2 MB of flash to be sure you use all aspects of the Ardurover firmware.
I would start by reading Rover Home — Rover documentation (ardupilot.org) and click on every link on those pages and read all of that, too. It is a lot to understand, but the information is there.
If you want to use RTK, you’re going to need to connect to a fixed “base station” in some way. You could use another ardusimple board and antenna as the base station, but the connection might be a little tricky. With some help from users here, you should be able to give it a go.
I’d strongly recommend you use a telemetry radio that you listed as optional because your rover F9P will need to receive live corrections while the vehicle is moving.
Many times builders use “power modules” between the battery and the motor controller to monitor the current and simultaneously tap off 5v for powering the flight controller. If you’re using a 24v battery, you would negate the need for that BEC if you used a power module like https://store.mrobotics.io/product-p/m10077a.htm
You only need an internet connection if you plan on using some public network of highly accurate base stations. Some US states like Iowa have them available for free if you register. Some places require a paid subscription, and some places there are just none available and you need to use your own like I mentioned in the post above. Your precision will decline by about 1mm for every km of distance you are away from a base station, so if the public ones are far away, you’re better off with a local one anyway.
Finally, the Emlid Reach RS2 is a pretty nifty base station as it has wifi built-in, and it can stream the corrections to your laptop and to the rover with minimal setup. I use this configuration often with airplanes receiving RTK messages.
I want to connect to the French centripede network (https://docs.centipede.fr/ ) which is free and will allow the use of RTK, however I will need an internet connection. Centripède is an opensource rtk network, my proximity to a base will allow me to be precise.
At first I would like to control my machine with an RC radio, but my final goal is to use the rtk so I wonder if the Pixhawk is the solution.
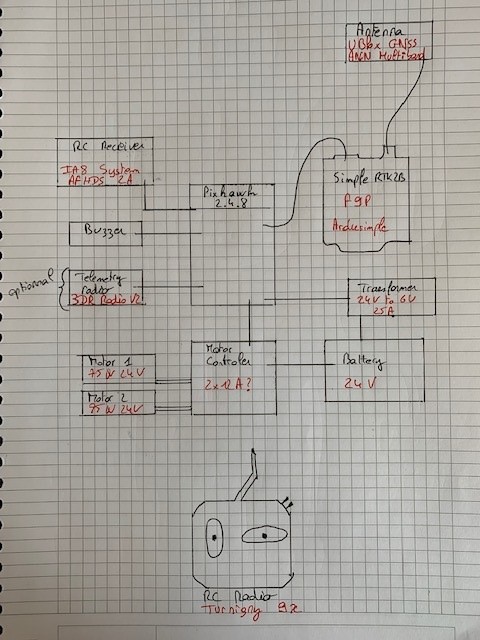
In the photo above there is the list of components, the Pixhawk is almost 3 times cheaper in China for my country. I could see in other conversations that the Chinese components were less efficient but that the users did not necessarily see the difference. Is it really necessary to take the Pixhawk 3 times more expensive?
Regarding the telemetry radio it’s the same thing, some models are much cheaper in China, but are they efficient? Do you recommend the 3DR radio v2 to me?
My budget is limited for my “prototype”, if someone can advise me on a site where the products are of quality and accessible from France I would be happy.
Val,
I have an F9P RTK fixed base that is transmitting corrections to rtk2go.com, an internet-based NTRIP caster using a Raspberry Pi. I have a relay station which uses a Raspberry Pi as an NTRIP client to pull down the corrections and transmit to my autonomous mower using a LoRa module from Adafruit. I know this is not exactly what you plan, but it is close. I have documented how to set up the relay station. Eventually I will document the base configuration as well.