Hi all! Hope youre having a good day.
Can someone kindly guide me so as to where can I find functions like preflight calibration and preflight reboot in qgroundcontrol?
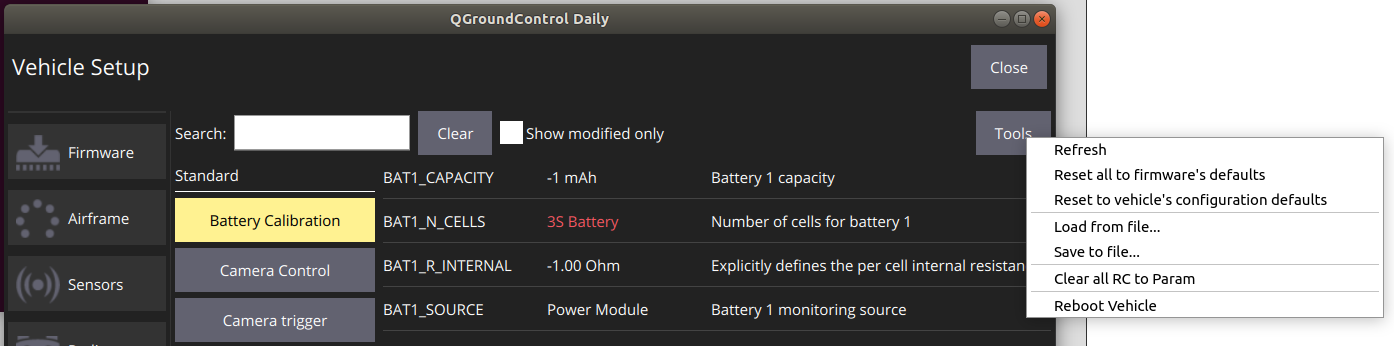
I can seem to reboot the vehicle in qgroundcontrol from the parameter list tab in tools option but that does not seem to reset the vibration clips that might have happened during moving the plane on the ground.
Any help will be appreciated.
As far as I know preflight cal in MP is just regular airspeed sensor cal which is available from Setup/Sensors. Also preflight reboot is just the same reboot which is available from the parameter editor.
1 Like
@DonLakeFlyer
Hi Don. Where can I find the preflight reboot from the parameter editor? I cannot find it. Thank you!
@DonLakeFlyer
@Sunny52266
Ok, thank you Don. I am getting “EK2 Yaw Inconsitent” message on one of my Cube Black FC and it always happens on the first flight of the day. I am using the Herelink and QGC and the forum says to force a gyro calibration in MP (pre-flight calibration) and it works using a USB cord connected to my computer and cube. I am trying to figure how I can do the same process in QGC. Any suggestions? My other two cubes do not get give me this message. I am running copter 4.0.4rc2. Thank you.
Just do a Gyro Cal from the Setup/Sensors page.
Sorry, but I do not see a gyro cal in the setup/sensors page. Is it called something else?
Edit: I see it on a online picture…I am away from the copter and will try it tomorrow. Thank you.
Good morning, Don. The gyro calibration setup seems to be only on PX4 software as it does not show up on my Herelink QGC or my laptop QGC. I will try the tools tab and reboot today to see if that works. Thank you.
Ah, ok. Forgot about that. I’ll add a separate Gyro Cal to Sensors for ArduCopter. No idea how long it will take for HereLink to pick that up. I have no idea what those folks are doing.
That’s not quite right it needs to be a Preflight selection which is slight different depend on Plane versus Copter.
Here is what I did:
- ArduPlane vehicles already had support for Pressure/Airspeed cal which is the same as what MP PREFLIGHT_CALIBRATION does
- ArduCopter vehicle already had support for Pressure cal
- I added support for separate Gyro Cal for ArduCopter vehicles
This covers all that MP PREFLIGHT_CALIBRATION does…
Keep in mind this is regular QGC. I’m not associated with the HereLink folks. How/when this gets there I don’t know.
And from doing some poking through the source if you do a Level Horizon cal it will also cal the gyro. So you should be able to do that on your HereLink
1 Like
Wow, thank you Don for some great information and work!! Yeah, it will be a long time before it makes it if ever into the Herelink QGC. Does not seem like they are supporting it very much anymore. The Herelink version is many behind the laptop one. The level the horizon cal might be difficult out in the field or site as I am not always around a level piece of ground to do it, but thank you for digging and finding that. I wonder if I do a pressure cal…will that work? How do I get the one for my laptop you just did adding the gyro cal? Is it a daily build? Thank you, Don.