Hi everyone,
we are using precision landing for a quadcopter (ArduCopter, version 4.1.5) with an onboard computer NVIDIA Jetson Nano and a Raspberry camera. I used ArUco marker as the landing pad and Dronekit API. I tested the MAVlink message on SITL and ROS/Gazebo, and everything is fine, drone could move to landing target.
I also set the:
LAND_SPEED,
PLND_ENABLED =1 (turn on the Precision Landing mode)
PLND_TYPE = 1 (for companion computer)
PLND_EST_TYPE = 0
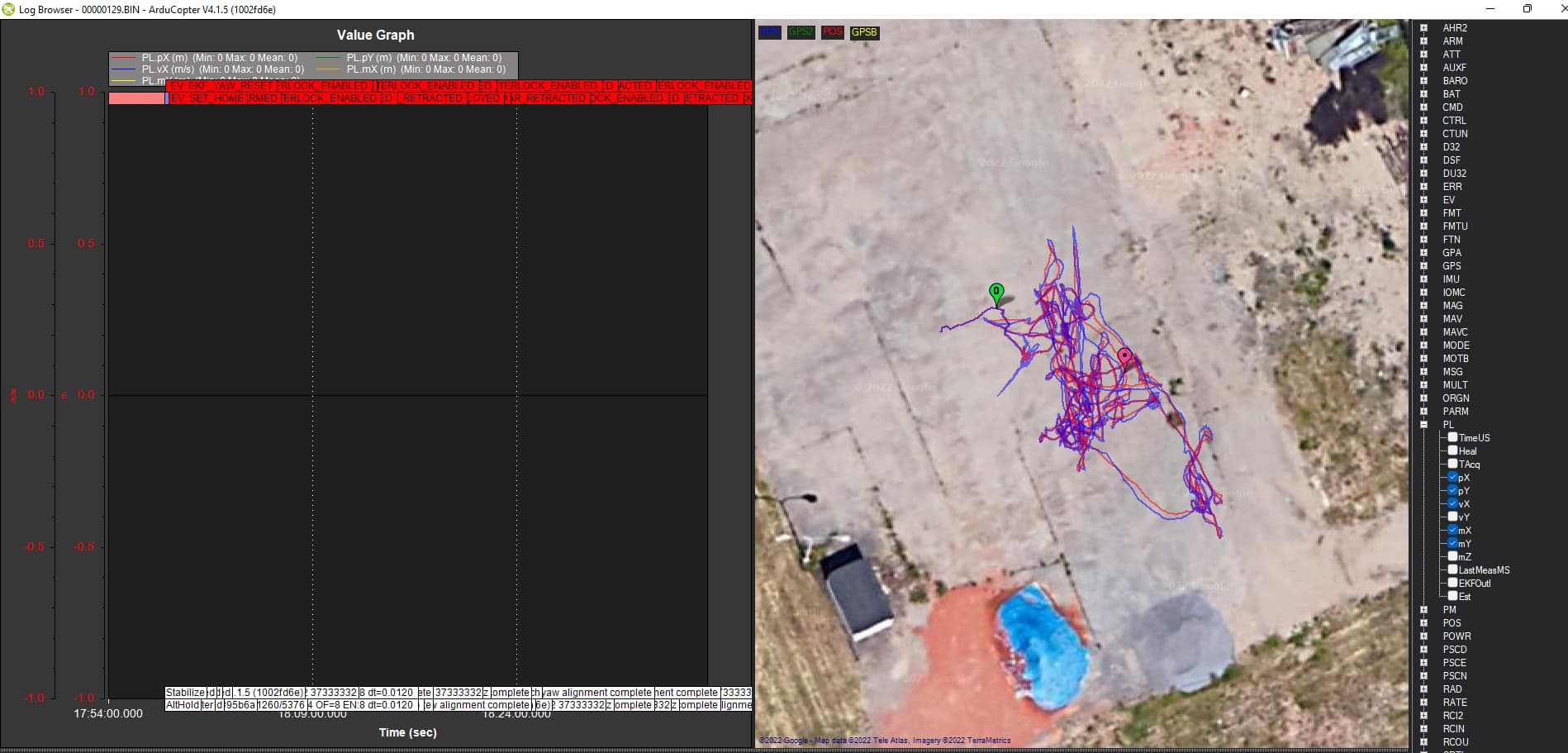
But in real tests, it seems the copter does not follow the landing pad when I switch to Landing mode. The landing pad was detected and this was shown in my record video. All the values under PL section in the data flash log are zero. Meanwhile, the result in the environment was OK.
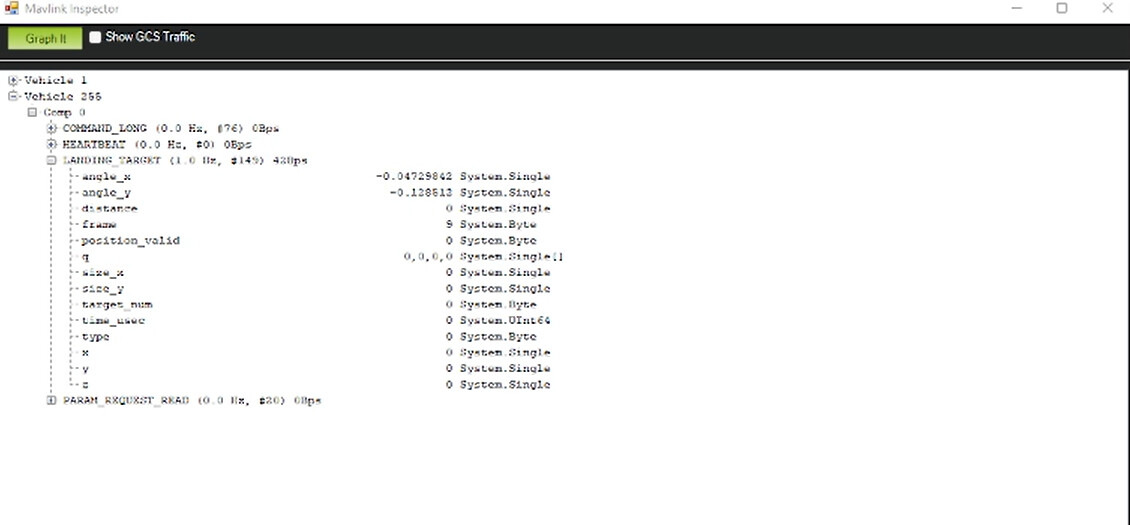
In the MAVLink inspector, I could see the LANDING_TARGET from Vehicle 255, but nothing in PL logs.
Sorry, i have no time to look at your logs, but i can confirm that companion computer , aruco based Precision landing is working great with arducopter 4.1.5. Raw estimator.
Sorry for such a long time no respond. I did the test of precision landing using two MAVLink message: Landing Target and Distance Sensor. It was successful.
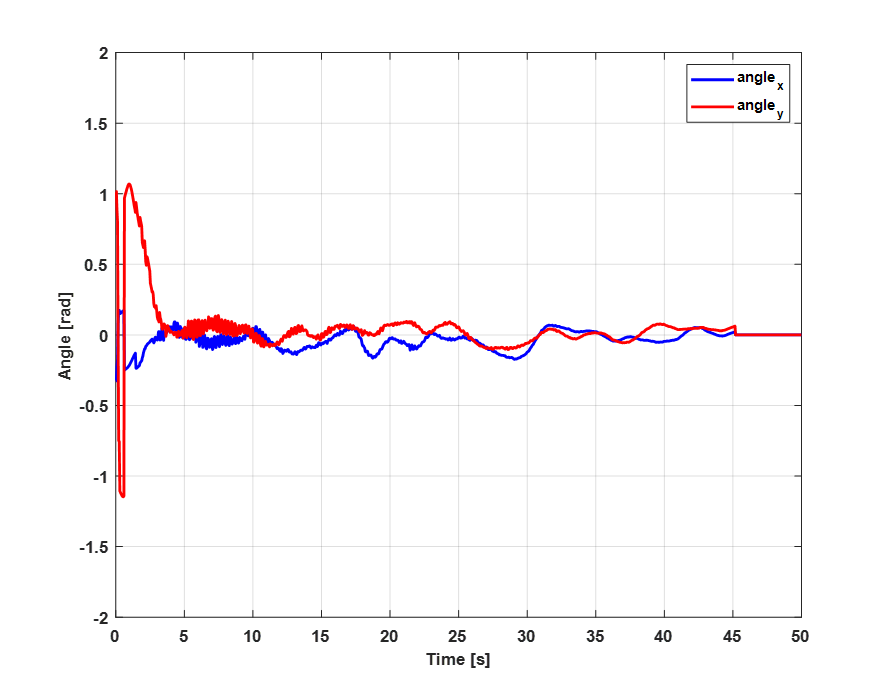
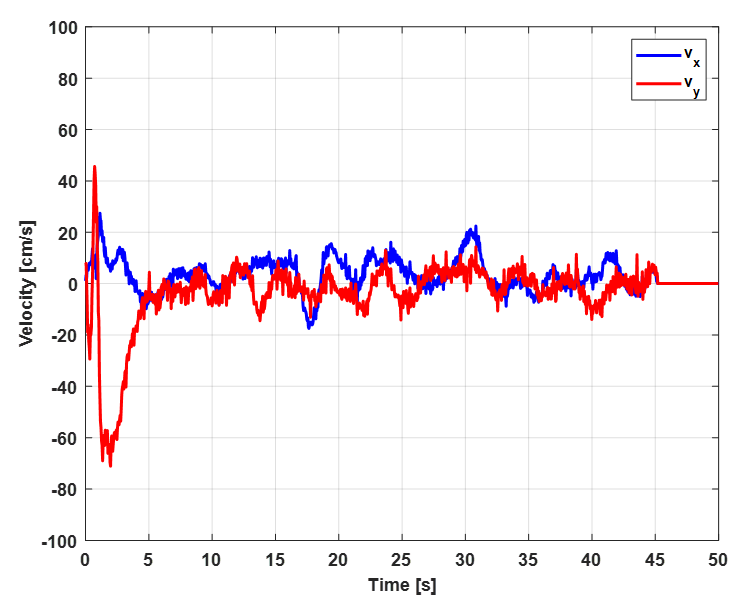
However I will send you three graphes of Precision landing.
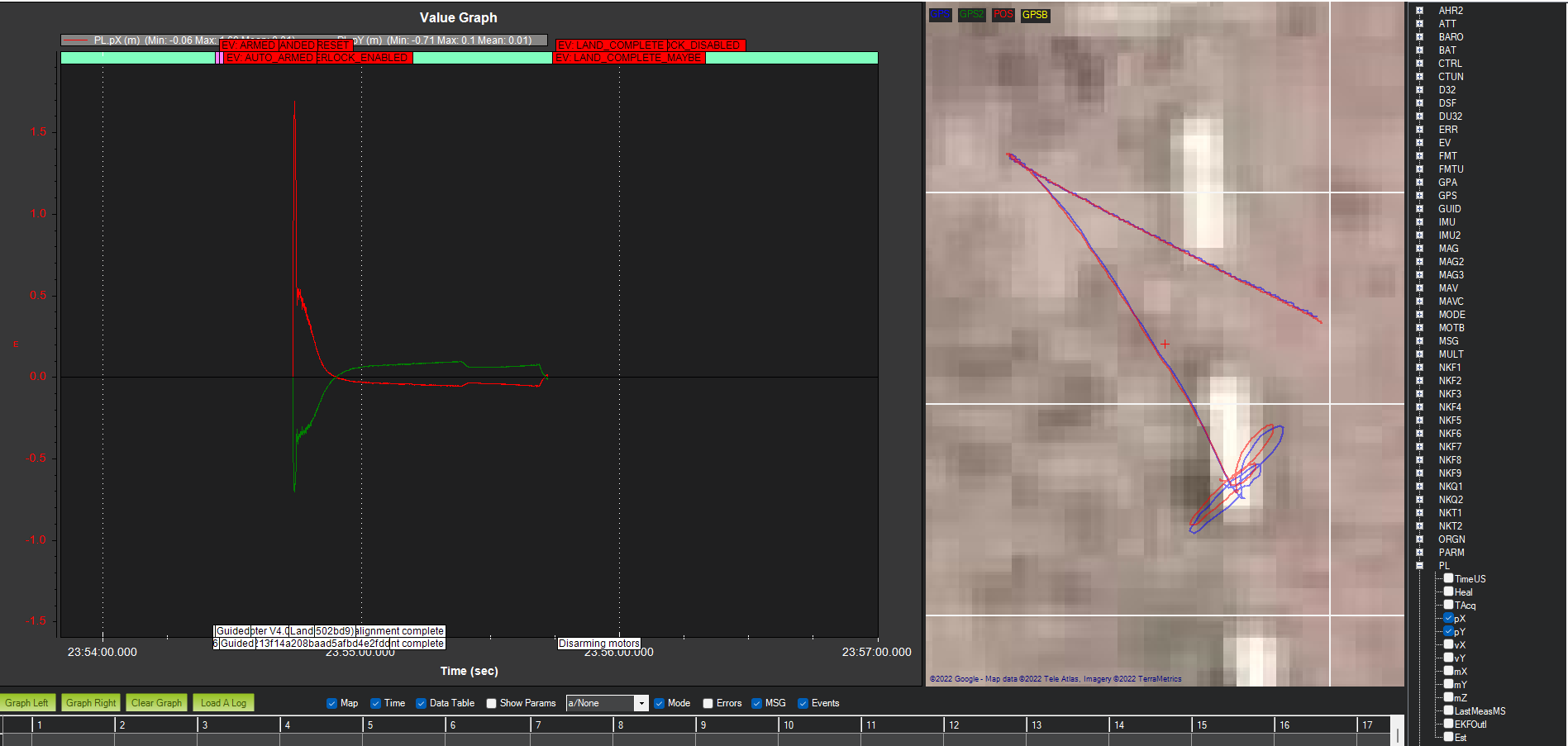
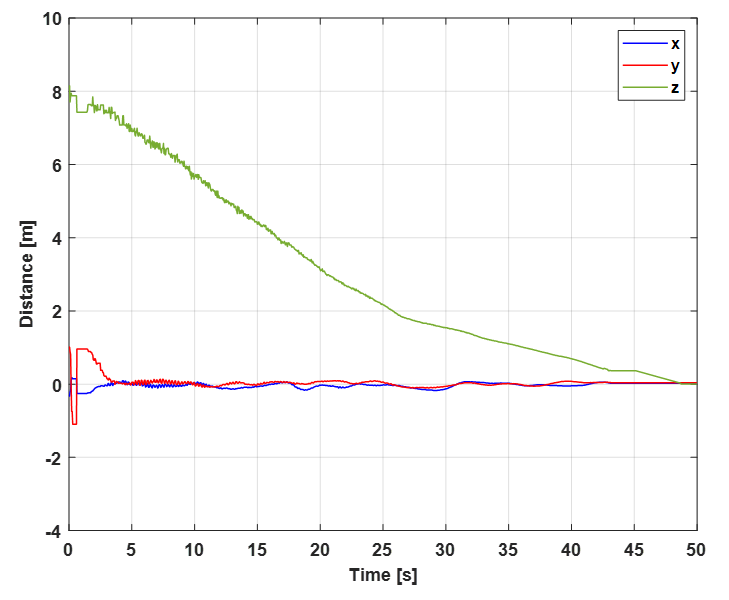
Fig.: Position of the drone with respect to the markers on the ground in the real-world flight tests.
It can be explained that: When the UAV begins to fly toward the target and reaches the desired position, it levels to land on the target. However, because of its inertia, its speed does not equal zero when it reaches the destination. Therefore, the UAV overshoots and begins braking behind the target, then begins flying in the opposite direction, overshoots again, and so on, until the target’s angular offset from the image center is small enough.
I want to ask you if there is any solution to reduce the influence of the inertia. Even when I reduced the WPNAV_ACCEL parameter and WPNAV_SPEED, it seemed not work too well.
Thank you for spending time for me.
Best regards
I am doing the same project. Vehicle not responding to landing_target_encode mavlink message. By reading your reply, i understand that I need to use a rangefinder also. Can you provide the mavlink example message for the mavlink based range finder?