111186
February 18, 2020, 10:23pm
1
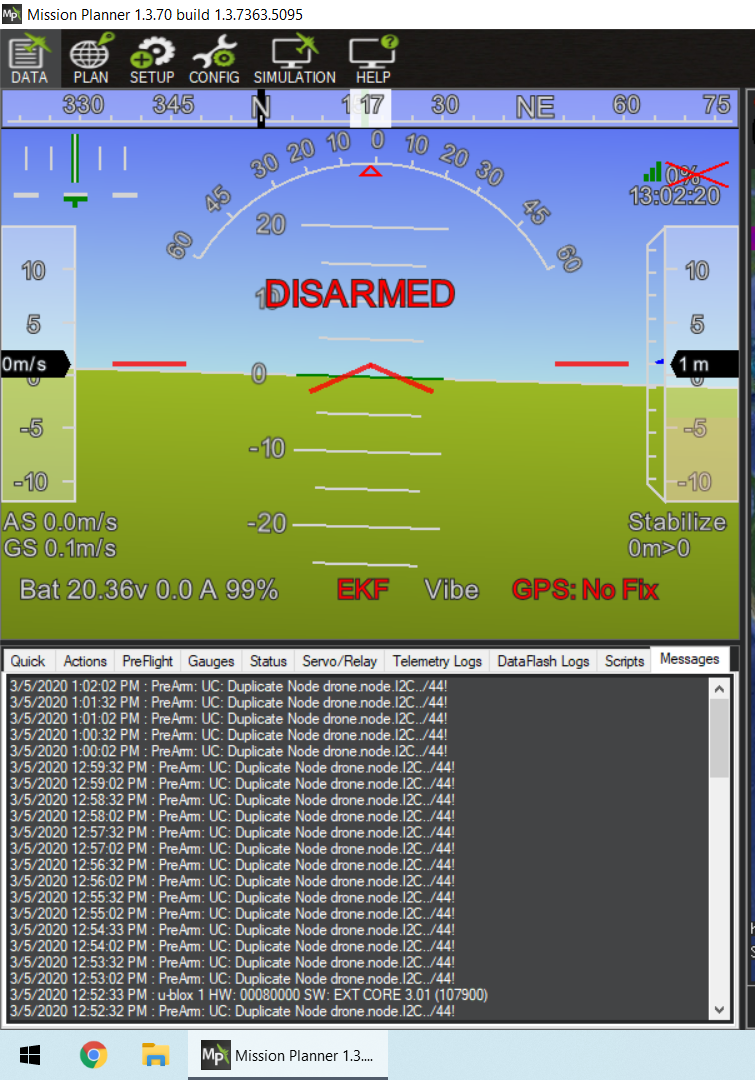
The Following Message is printed by the PreArm check:
2020/02/19 7:19:20 : PreArm: UC: Duplicate Node com.hex.here…/20!
iampete
February 18, 2020, 10:37pm
2
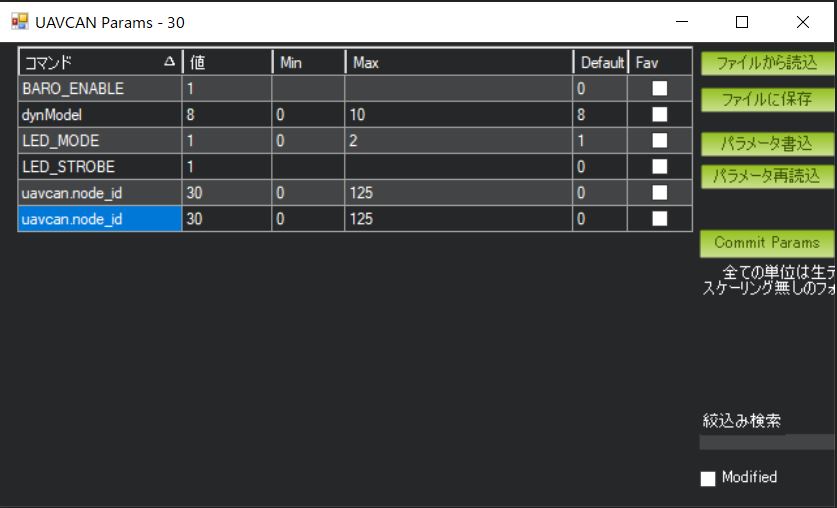
you have to here2’s plugged into the same CAN port? You need to change the node id of one of them (you can do this via the slcan params). Or put the second one on the other can bus and driver
111186
February 18, 2020, 10:51pm
3
Thank you for the appropriate advice.
iampete
February 18, 2020, 10:55pm
4
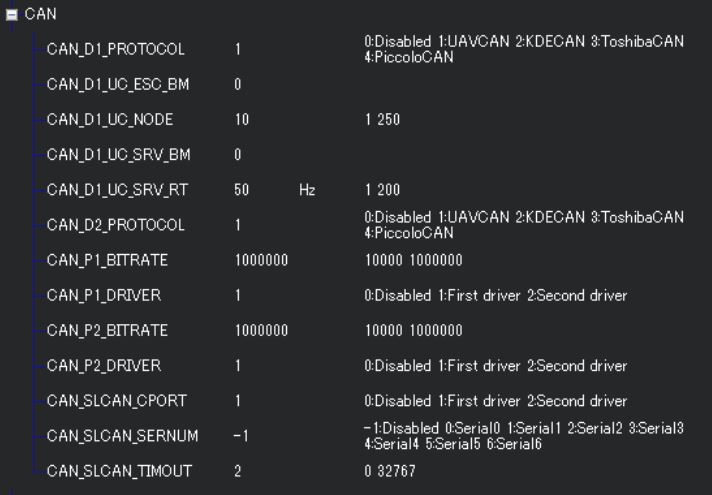
ArduPilots Default ID is 10, Odd that you had a conflict I guess you didn’t change it? (CAN_D1_UC_NODE)
111186
February 18, 2020, 11:28pm
5
iampete:
CAN
I checked the CAN_D1_UC_NODE. It was the default 10. In this state I tried to return the ID of Here2 to 20 for reconfirmation, but still see the same error.
iampete
February 18, 2020, 11:59pm
6
Odd, can you turn on LOG_DISARMED and upload a log of the issue, maybe one of the CAN experts knows whats going on, @rmackay9 @tridge
111186
February 19, 2020, 12:28am
7
Link of log.
Did you ever find a fix for this issue? im using a black cube with only one here2 GPS.
Having Same issue with Here2 GPS and other UAVCAN devices.
mainframe
June 19, 2022, 9:50pm
10
Could be related to persistent UAVCAN device hw id/uavcan id map:
opened 08:25AM - 01 Oct 20 UTC
CAN
## Bug report
**Issue details**
The map of node's unique hardware id to UA… VCAN node id is stored in persistent storage. So when connecting a different device with the same node id (after disconnecting the first device and rebooting AP of course) it will report it as duplicate id.
How to recreate the bug:
Connect a UAVCAN device with a static node id. Then reboot AP and connect a different device (with a different hw id) with the same static node id.
**Version**
Copter-4.0.4
**Platform**
[ ] All
[ ] AntennaTracker
[X] Copter
[ ] Plane
[ ] Rover
[ ] Submarine
**Airframe type**
hex
**Hardware type**
mRoControlZeroF7