I’ve just started with my first ArduRover project. Your documentation is great and leads me quite well, thanks alot!
My setup is a “skid steered” boat with only two motors (reverse should be possible) and no rudder. I have got:
a Frsky X10s with a binded xm+ plus receiver
a Pixhawk 4 with the PM07 board and GPS Module
two preinstalled ESC (which I know little about but it got a PWM input)
So far, I made my way through till the point where I want to run a motor test (Motor and Servo Configuration — Rover documentation). Means that I have setup my radio control and calibrated the GPS and accelerometer.
As Soon as I change to manual mode and select the any motor test feature in Mission Planner, the test is rejected with to following message:
Changed my Tx to Taranis QX7 and another a Receiver (XM+). This has not changed anything.
Checked all my switches whether the limits are reached (LOW <1200us and HIGH >1800us).
Set the following parameter:
BRD_SAFETYENABLE = 0
SERVO1_FUNCTION = 73 (Throttle Left)
SERVO3_FUNCTION = 74 (Throttle Right)
MOT_PWM_TYPE = 0 (Normal)
FRAME_CLASS = 2 (Boat)
FRAME_TYPE = 0 (Undefined)
This changed nothing about the listed problem. This is my current log:
19.11.2021 20:01:16 : PreArm: Roll (RC1) is not neutral
19.11.2021 19:56:19 : PreArm: Roll (RC1) is not neutral
19.11.2021 19:56:11 : PreArm: Roll (RC1) is not neutral
19.11.2021 19:53:46 : AHRS: EKF3 active
19.11.2021 19:53:46 : EKF3 IMU1 is using GPS
19.11.2021 19:53:46 : EKF3 IMU0 is using GPS
19.11.2021 19:53:46 : EKF3 IMU1 origin set
19.11.2021 19:53:46 : EKF3 IMU0 origin set
19.11.2021 19:52:12 : PreArm: Roll (RC1) is not neutral
19.11.2021 19:51:02 : PreArm: Roll (RC1) is not neutral
19.11.2021 19:50:15 : PreArm: Roll (RC1) is not neutral
19.11.2021 19:49:47 : PreArm: Roll (RC1) is not neutral
19.11.2021 19:49:38 : IMU0: fast sampling enabled 8.0kHz/2.0kHz
19.11.2021 19:49:38 : RCOut: PWM:1-16
19.11.2021 19:49:38 : Pixhawk4 0020002C 3756500F 20373658
19.11.2021 19:49:38 : ChibiOS: 08877972
19.11.2021 19:49:38 : ArduRover V4.1.1 (7b9f15d8)
19.11.2021 19:49:38 : IMU0: fast sampling enabled 8.0kHz/2.0kHz
19.11.2021 19:49:38 : RCOut: PWM:1-16
19.11.2021 19:49:38 : Pixhawk4 0020002C 3756500F 20373658
19.11.2021 19:49:38 : ChibiOS: 08877972
19.11.2021 19:49:38 : ArduRover V4.1.1 (7b9f15d8)
19.11.2021 19:49:37 : IMU0: fast sampling enabled 8.0kHz/2.0kHz
19.11.2021 19:49:37 : RCOut: PWM:1-16
19.11.2021 19:49:37 : Pixhawk4 0020002C 3756500F 20373658
19.11.2021 19:49:37 : ChibiOS: 08877972
19.11.2021 19:49:37 : ArduRover V4.1.1 (7b9f15d8)
It seems (to me as a beginner) that Roll gets a wrong signal or is not configured correctly. When I look at radio calibration everything looks fine to me (see screenshot). I assume, that 1495us is fine for a neutral position, am I wrong? It also corresponds to my LCD display of my Tx, where Roll jitters around -0.1 and 0.1.
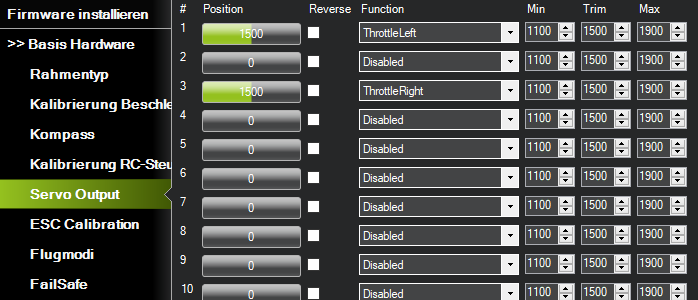
Another observation is that Servo Output shows 1500 on Position 1 and 3, which seems fine. But: I does not move at all when I move the sticks around. Is this only moving when armed?
Have I left out something essential? I am afraid that I am behaving like an idiot. frankly I might not be the brightest but I have spent now already to full days on understanding my issue.
Some pieces of advice would be appreciated alot… thanks!