I have calibrated everything, including the radio and compass on my pixhawk, but no matter what I do, it will still show “PreArm: Radio failsafe on”.

I have reset the radio, reset the flight controller, I don’t know why but for some reason the pixhawk’s light stays green instead of yellow, it used to be yellow but its not anymore, probably because my gps module broke but I wouldn’t know. I am using an fs-i6x. I’ve had this issue for multiple weeks and still can’t figure out why it won’t work. Not even the motors are spinning when I lift the throttle.
Welcome. When it complains about the radio you must check the wiring connections and after that recalibrate the RC radio sticks on mission planner, if the green bars do not move there is something wrong in the connections.
All the connections are as per the documentation. I have a gimbal as well connected but that shouldn’t be a problem. I have calibrated the radio already so that isnt an issue either. I have already searched all over the internet and see no one with this kind of issue.
that said, the ACT light is blinking, the 2 PWR lights are solid and the B/E lights are off on both sides. I dont know if that helps.
Then I guess is time to update from ArduCopter 4.0.x to ArduCopter 4.3.6
It will not fix this issue, but it will fix other issues.
Already updated, its updated to the latest release. I did it just a few hours ago and still.
On the topic it was still marked as 4.0.x. I corrected that now.
Post a video of the green bars moving. Check all the failsafe parameters. Post a .bin file.
What is the value of your minimum PWM for RC throttle, usually something like:
RC3_MIN,983
Make sure the throttle failsafe value is at least 30 PWM less
FS_THR_VALUE,950
the FS PWM is 968 and the RC Throttle pwm is 1010, I don’t think that is an issue.
https://streamable.com/4y4i81
https://streamable.com/41vb04
Couldn’t find a .bin file in the SD Card.
Can you supply a pic of the receiver and flight controller connections.
Where does the gimbal connect to?
The gimbal is a storm 32 gimbal. its ground is connected to the ground of output 5, its yaw pitch and roll are connected to output 6, 7 and 8 respectively. The RX is connected to the rc pins on the pixhawk, the motors are connected according to the pixhawk documentation to pins 1 to 4
I believe you want to connect using the i-BUS servo output on the receiver, like in this picture
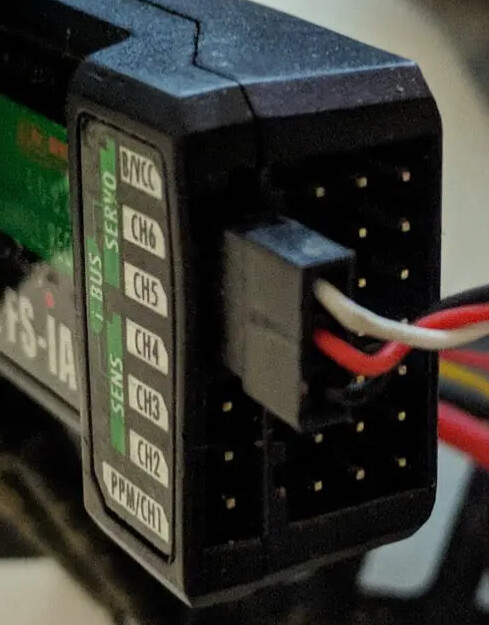
and in the transmitter you will have an option to set i-BUS or SBUS output.
Prefer SBUS if you can get that working.
Also check the failsafe settings and verify it actually works - switch off the transmitter and see if the flight controller goes into RC failsafe.
I have it set to SBUS and nothing happens when I turn off the transmitter, the red led just starts a slow blink and everything on mission planner remains the same.
Hi!
I have the same problem with this message: prearm:radio failsafe on… Have you resolved this problem?
Check in your parameters to find RC3_MIN and it should be about 1000 or so.
Set FS_THR_VALUE at least 30 less than the RC3_MIN value.
1 Like