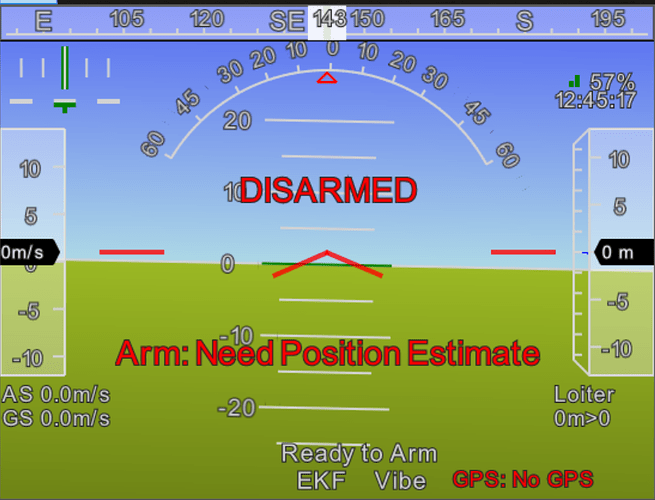
We are having issues getting a test flight setup for the PosHold (Position Hold) and Loiter modes. We are using Optical Flow [OpenMV] & Lidar (Without GPS). We have tried troubleshooting using other forum posts/wiki but could not find anything.
We have tried setting our origin (Set EKF Origin Here) and that didn’t work either. Arming in AltHold works, just can’t get PosHold or Loiter to work.