This error message occurs because our IMU driver has noticed a problem with the IMU and has had to reset it. In some cases at least we think this is a hardware problem and all that has changed is that we are alerting the user to the problem.
In any case I’ve added this to the Copter-4.1.0 issues list so hopefully some other devs can look into it once you download a log.
Yes, I think 0x1000000 is the imu_reset (table of error codes is here in the code). We don’t currently print a human readable string for the internal errors perhaps because we aren’t expecting them to be very common at least in stable releases… we may be wrong though so it’s worth us thinking about improving the message.
We found the same Internal Error 0x100000 after a SmartRTL (successfully completed except for LAND_SPEED). Just after landing, we disarmed and changed flight mode, at this time MP reported the Internal Error 0x100000, no other relevant messages.
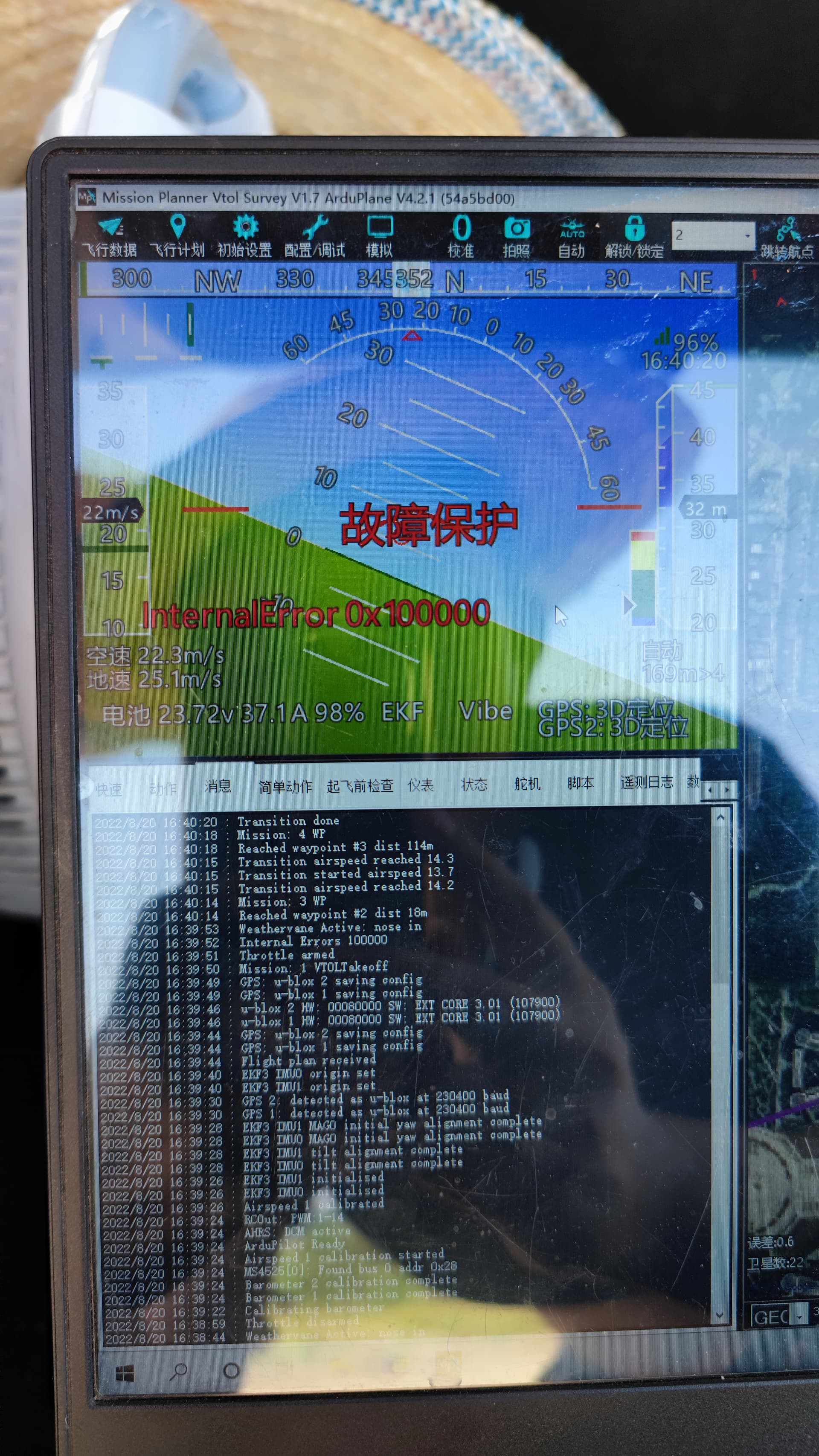
I am not sure if I should post here. I see I didn’t get the full error message in the photo but maybe this will help.
These errors didn’t show up with the previous firmware. I am using an original Pixhawk from 2014, not a clone.
I am also attaching all the logs of the same day. I flew this morning at ±7am. Not sure which log had the error in. Probably 175. I was changing flight modes in mission planner and saving the flight modes to the drone.
@Taskman@xfacta I am facing the same error ‘PreArm: Internal errors 0x1000000 l:168 imu_reset’, 24 seconds after Power ON of the Pixhawk(I am using the Cube Orange), it would be of great help if you would help me out with that.
If you need any additional information for resolving the issue do let me know.
I suspect that Internal Error was changed to remove/fix it or maybe update the text so it was more meaningful. The consensus was it was due to a hardware error.
Make sure you are on latest stable firmware version, there have been many important fixes.
Also check you are using EKF3 after the upgrade.
@Taskman During the whole process I assume you didn’t changed the Flight controller. Keeping the flight controller same, you switched around with the firmware versions, and all the hardware on the aircraft were kept same.
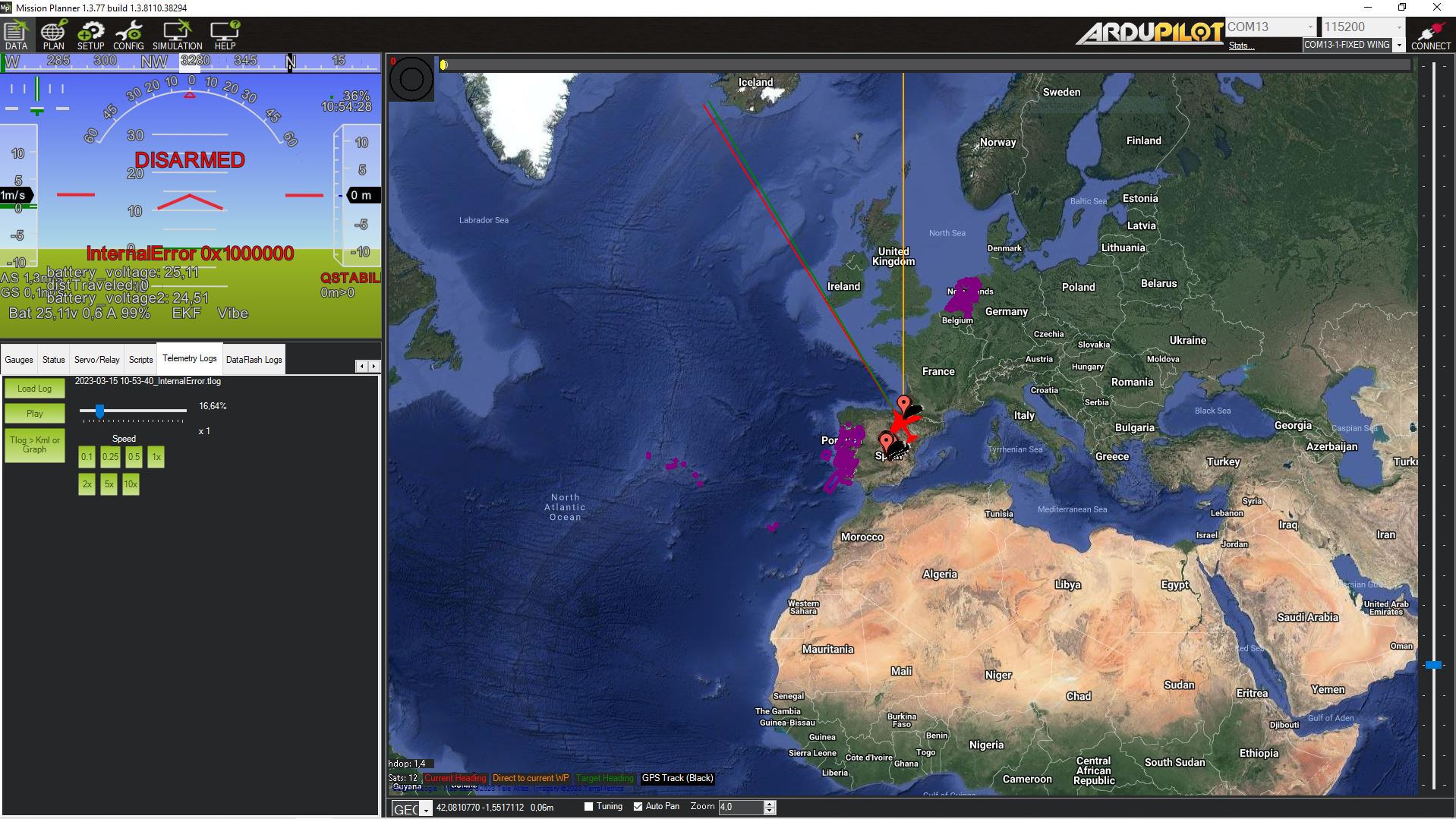
We’ve been experiencing the same issue for several months now and we don’t know why, since they appeared out of nowhere using exactly the same hardware and different software versions, even old ones that never had any issues before. It happens completely randomly on different PixHawks with different firmware versions and it’s been impossible to replicate on a test bench.
Yesterday for example the error reappeared after 4 or 5 months without seeing it (.tlog here).
After restarting the drone, the error has disappeared, but on the next flight it behaved badly and it was very complicated to land it. It worked fine for the first few minutes and then suddenly went crazy.
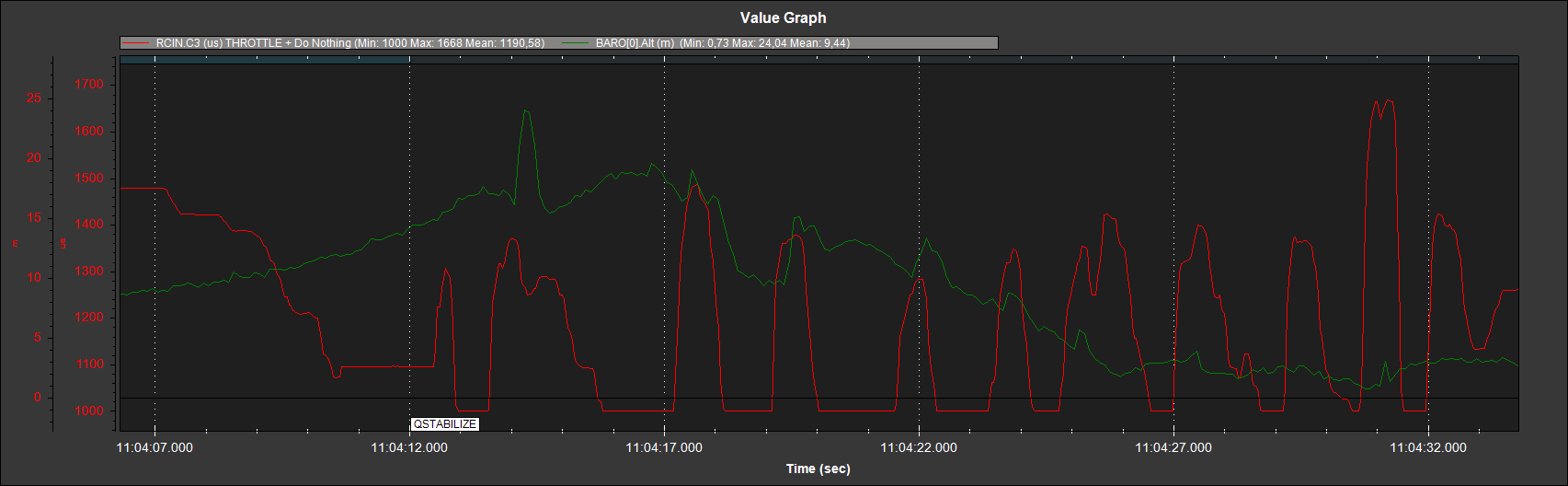
Also, no matter how much the throttle would go down, the aircraft would still go up, unless the throttle was at minimum, which cut the engines off completely.
That was the only way to bring it down “in a controlled” manner, letting it fall little by little with the motors off.
Does this have anything to do with the Internal Error? Any idea how to debug it?
The aircraft is a QuadPlane controlled by a Cube Orange with ArduPlane 4.1.6 (eddf0367). Attached log here.
I realize this is the copter thread, but Google pointed me here. I had 3 flights on Plane yesterday (4.4.dev), and only on the 3rd flight I had thousands of these IMU0 messages - something like 10 Hz I think. The plane flew absolutely fine in manual, stabilize and auto modes.
Edit: looks like the messages were logged at 50 Hz.