This drone flew and hold the position well (4.1.0) before moving to 4.4.x and above. I had also done the IMU temperature calibration, and redo compass calibration. Still, this message repeatedly appears. Well, it will disappear after around 30 secs. We have changed from Here to Here3 GPS too. I have set up the Quicktune, preparing to redo the yaw tune. I am not sure whether it causes a loading and results in a timing issue.
I am concerned it will appear in the middle of the flight.
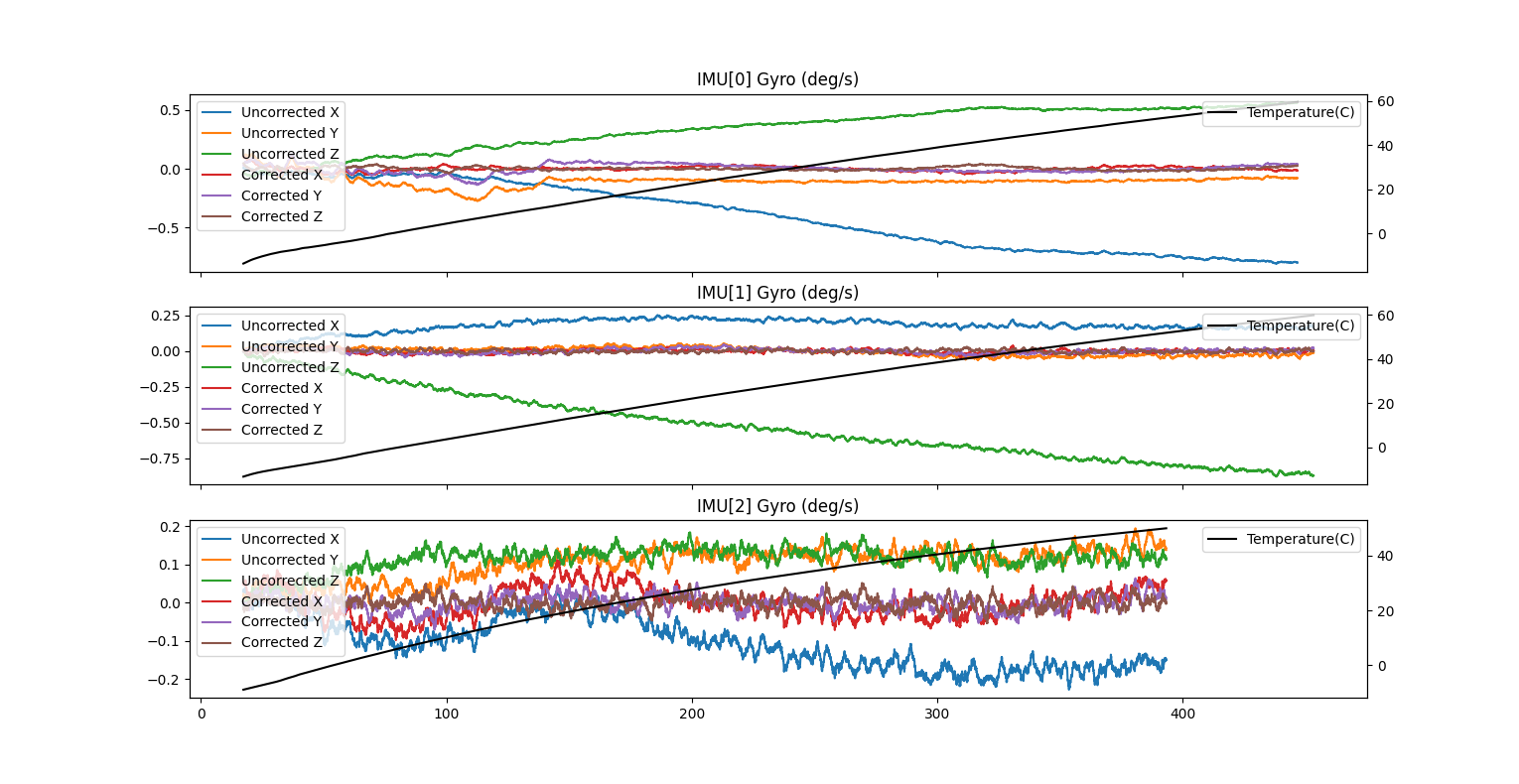
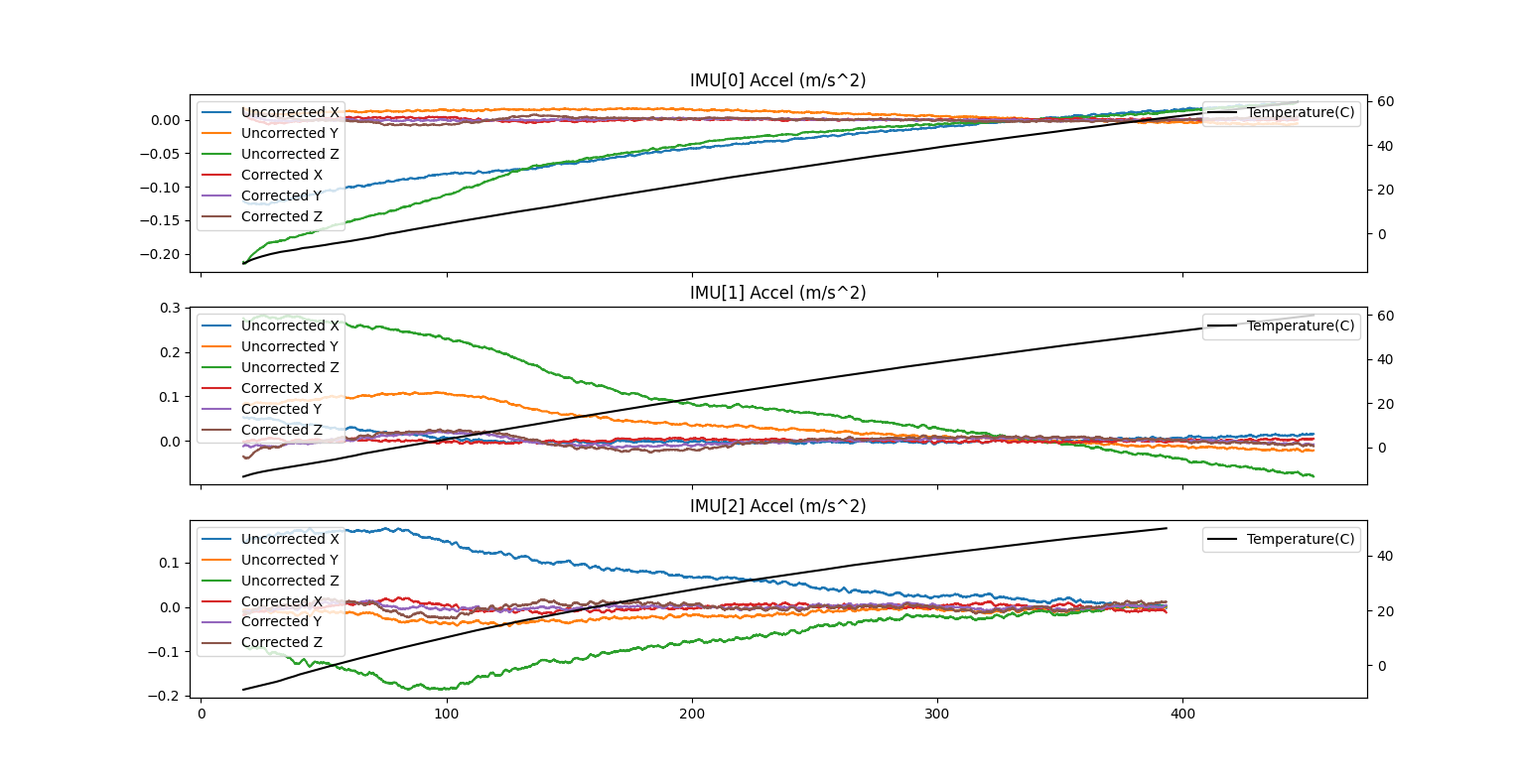
There’s nothing obviously wrong here. It’s a CubeOrange - I wonder if its to do with the first IMU being a bit problematic. Be worth trying to disable it to see if the problem goes away.
I am not sure if I need to highlight, that the following quick-tune parameters went missing at the same time in the log. Is it due to LOG_DISARMED, enabled?
QUIK_AUTO_FILTER,1
QUIK_AUTO_SAVE,0
QUIK_AXES,4
QUIK_DOUBLE_TIME,10
QUIK_ENABLE,0
QUIK_GAIN_MARGIN,60
QUIK_MAX_REDUCE,20
QUIK_OPTIONS,0
QUIK_OSC_SMAX,5
QUIK_RC_FUNC,300
QUIK_RP_PI_RATIO,1
QUIK_Y_PI_RATIO,10
QUIK_YAW_D_MAX,0.01
QUIK_YAW_P_MAX,0.5
I am using 2 Pixhawk 6x both with minor differences with setup. They are recieving this Gyro not healthy message with 4.5.3 firmware. It does not appear when loaded with 4.5.2 and able to fly with 4.5.2 Arducopter.
when I was setting up a new drone (4.5.3), I noticed the PreArm: Gyros inconsistent message appeared if I set the BRD_BOOT_DELAY,5000. if I set it BRD_BOOT_DELAY,0, it did not appear. Both software and hardware reboot do not appear the message with BRD_BOOT_DELAY,0.
or when RC is not turn on.
16/7/2024 10:29:41 am : PreArm: RC not found
16/7/2024 10:29:10 am : PreArm: RC not found
16/7/2024 10:28:39 am : PreArm: RC not found
16/7/2024 10:28:08 am : PreArm: Gyros inconsistent
16/7/2024 10:28:08 am : PreArm: Hardware safety switch
16/7/2024 10:28:08 am : PreArm: RC not found
16/7/2024 10:27:52 am : EKF3 IMU0 MAG0 initial yaw alignment complete
16/7/2024 10:27:52 am : EKF3 IMU2 MAG0 initial yaw alignment complete
16/7/2024 10:27:52 am : EKF3 IMU1 MAG0 initial yaw alignment complete
16/7/2024 10:27:52 am : EKF3 IMU2 tilt alignment complete
16/7/2024 10:27:52 am : EKF3 IMU1 tilt alignment complete
16/7/2024 10:27:52 am : EKF3 IMU0 tilt alignment complete
16/7/2024 10:27:50 am : EKF primary changed:1
16/7/2024 10:27:50 am : AHRS: EKF3 active
16/7/2024 10:27:50 am : EKF3 IMU2 initialised
16/7/2024 10:27:50 am : EKF3 IMU1 initialised
16/7/2024 10:27:50 am : EKF3 IMU0 initialised
16/7/2024 10:27:48 am : GPS 1: specified as DroneCAN1-125
16/7/2024 10:27:48 am : RCOut: PWM:1-8 DS600:9-12 PWM:13-14
16/7/2024 10:27:48 am : AHRS: DCM active
16/7/2024 10:27:48 am : ArduPilot Ready
16/7/2024 10:27:48 am : INS: alloc 6144 bytes for ISB (free=604104)
16/7/2024 10:27:48 am : Barometer 2 calibration complete
16/7/2024 10:27:48 am : Barometer 1 calibration complete
16/7/2024 10:27:46 am : Calibrating barometer
16/7/2024 10:27:43 am : Initialising ArduPilot
Going back to the old drone (4.5.4), software reboot does not appear for BRD_BOOT_DELAY,0, but will appear for hardware reboot sometime.