I guess I’m looking at this a little differently.
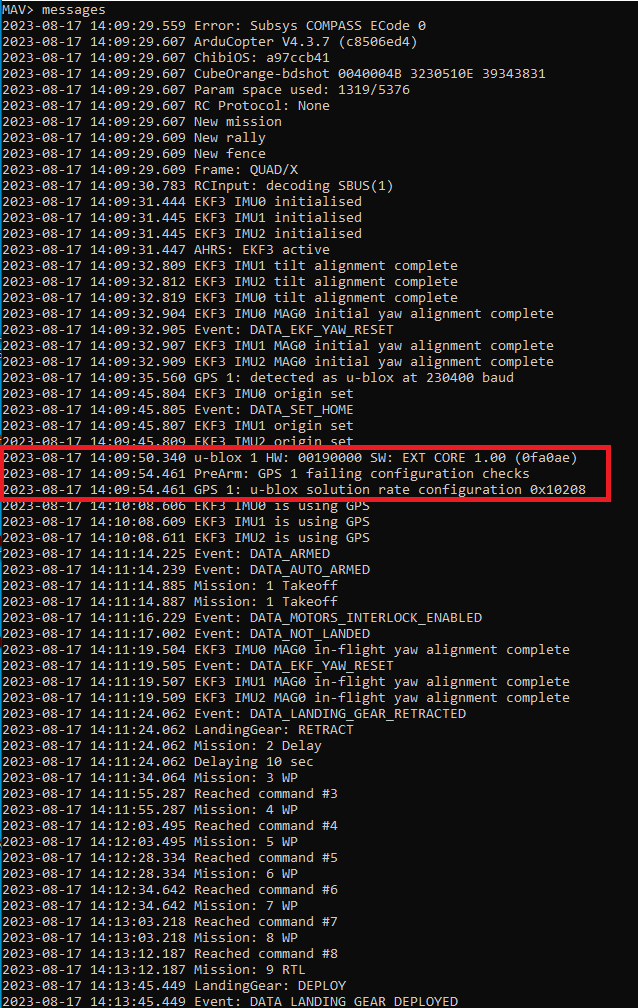
I’ve used this exact configuration for a long time - a couple of years. So when all of a sudden a new message pops up, I think it’s important to know why.
Every message generated by ArduPilot is issued because of some condition that has occurred. If one could simply read the code, it would be easy enough to simply look at the condition statements that triggered the message.
But I’m one of those people who don’t read the code. And I suspect I’m in the majority of the ArduPilot users. If the ability to read the code is a requirement for successful ArduPilot usage - the user base will be much smaller.
What’s needed is an error message directory - a listing of all the ArduPilot error messages, and the reasons that the software issues each message. Then the messages could be used effectively for diagnostic purposes.
Strategies such as setting a boot delay might reduce the occurrence of some messages - but in the end, it’s still going to be necessary to know what triggered a message.
Another example just this week was the Data_Autotune_Reached_Limit message. There’s simply no information in the wiki to let a user know if this is a critical message of some sort - or something benign, as it was in the instance that it occurred to me this week. Thanks to the effort @Yuri_Rage made on my behalf, I found that the message was benign.
Without such a directory of messages, three things can happen:
- Messages are ignored that should prompt a corrective action.
- The kind people like you, Dave and Yuri have to take time out of your busy day to look up what’s the cause of the message.
- Users who don’t make the effort to find someone to help them end up needlessly chasing down the problem - and may never find the cause. This can cause people to give up on ArduPilot - and that’s not good for any of us.
Obviously this is a sentiment that needs to be expressed to a different forum - perhaps some DEV forum that considers such things. And as no one gets paid for writing ArduPilot code - there’s not much incentive to make the effort.
One remedy might be to make a rule enforced by the DEVs that no error message can be written into the code unless it’s causes are added to the message “directory.” This isn’t really any different than requiring new code functions be documented in the wiki.
I started working with software back in 1978. This is not a new thing. You wouldn’t believe the volumes of paper IBM published to handle this sort of thing on an OS/360.
OK - I’ll get off my soapbox now. Thank you for allowing me to share my thoughts about this. And I really appreciate all that people like @xfacta @dkemxr and @Yuri_Rage who make the effort to dig into what happens when such undocumented messages pop up.
Thank you!