i have Navio2 flight controller running arducopter 4.0.3.
I have calibrated and setup everything.
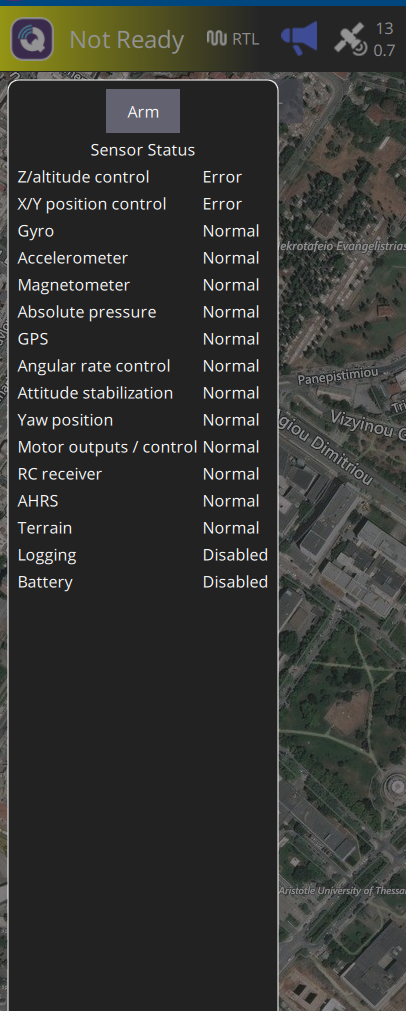
THe problem is that when I am in Loiter mode, the pre-arm Status is always Not Ready and it shows that there are 2 errors (Z/altitude control error and X/Y position control error).
What do these pre-arm check errors mean ? How to fix them so that my pre-arm status become Ready ?
Does the drone have a full GPS position lock? Are you trying this indoors? If so, try again outside in clear view of the sky. If the GPS has never had a lock before, or it’s been a long time, it will take a while to initialize.
It looks to me like an EKF issue. try it outside and let it sit for a while with a clear view. Might also be a good idea to update the firmware to the latest version. 4.0 is pretty old.
i upgraded to ardupilot v4.3.7. And tested the drone outside. The pre-arm checks now show normal but I have other problems. I cannot fly in Loiter mode because it looks like the drone starts acting crazy and cannot control it. I also received the message “EKF3 IMU_ground mag anomally, yaw realigned”.