Good day all, I have had issues with my PPM stream (so I assume it to be) for quite some time now. Each time I feel like I have resolved it the issues come back.
In a nutshell the PPM stream becomes “corrupt” for lack of a better term. In reality it goes crazy in the logs. The signals used to go from zero to full back and forth on all channels extremely rapidly. This causes issues of course when flying… The fix is to turn the transmitter off, then the RTL kicks in and the drone flies home and lands fine. Upon turning the TX back on again all is clear for another flight. The problem is that this issue is very random, has been going on for years and I am looking for some help.
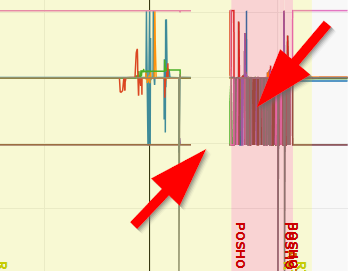
In the following image you can see first a dip down to zero on a few channels, then a blank space? not sure if it’s realated but no logged data here… then you can see all the channels going crazy between 1,000 and 1500 value. The drone is out of control at this point. I shut off the TX at the far right of the signal spaz and the drone goes into RTL and lands.
Things I have done.
-
upgraded to 4.4.0 because rmackay9 suggested this was a possible bug in previous versions. This does not seem to have corrected the issue however in the logs prior to FW 4.4.0 the channels would go from 1000-2000 rapidly but now they tend to stay between 100-15000 rapidly with the odd dip below 1000 all the way down to zero
-
I have logged the drone just sitting on the bench and I do get random spikes (signal goes down to 0 from 1500 very briefly then everything back to normal) but so far have not been able to replicate the complete spaztic behavior problem on the bench.
-
I have logged PPM stream data from the PPM out on my transmitter (Horus X10S express) and it too shows some brief drops to zero on a few channels but I am unsure if that is just my coding issues (I have it hooked to an arduino uno logging to an excel data sheet)
-
I have changed radio’s from the Horus to Radio master boxer with no change in bench logging behavior (it still drops a few frames down to zero for no reason while sitting on the bench.
-
I have set the RC_protocol to PPM stream manually in the parameters
-
I have tried updating firmware on the transmitter (using Open TX) with no change
I feel like if it respects the RTL failsafe values given by the modem (I run RFD 900 with PPM passthrough) then the drone is not at fault (or is it?)
I feel like again if the data modem is able to output a RTL failsafe position then it’s not likely the data modems
So my gut leans me toward the transmitter.
Here is a link to the bin file. You will see some agressive flying but at the end of the log it’s very obvious when the RC inputs go crazy and I finally turn off the TX and the drone RTL’s
Any thoughts appreciated.
https://drive.google.com/drive/folders/13DKSeLL7bgBVC66oEtEEO_voHwrU8Ile?usp=sharing
Hardware
Horus x10s, RFD900 V2 running on PPM passthrough (used to control drone and attain telemetry data)
Cube orange