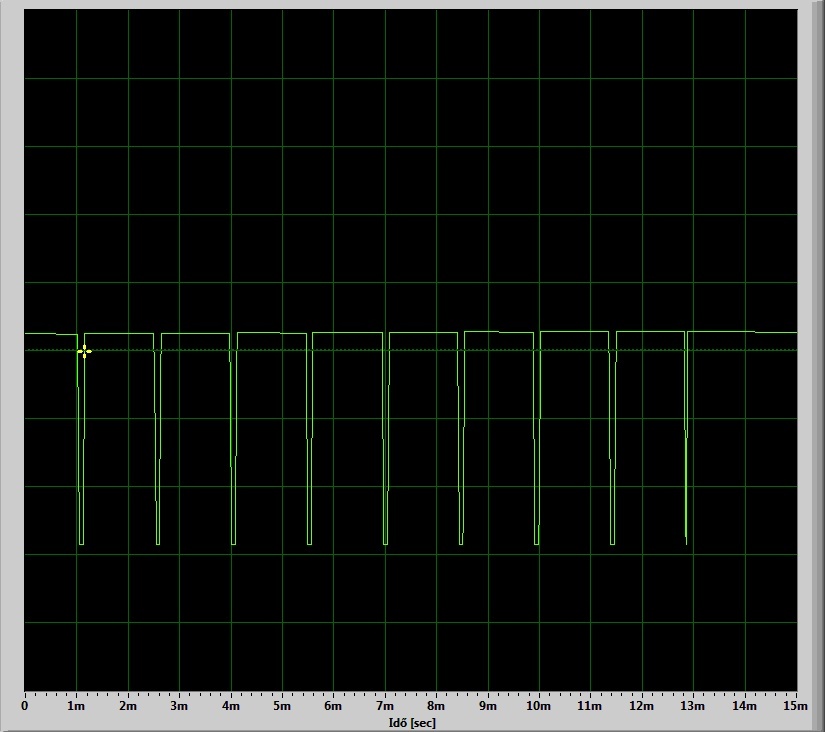
I think this PPM - SUM signal is quite narrow as it shoud be (and this is the problem), but when I move with knobs on turnigy radio the signal is changing. Does anyone know what I should change in the code of arducopter to recognize this signal?
If I recall correctly, the PPM signal does not have long low-times. It does not look like many juxtaposed PWM signals.
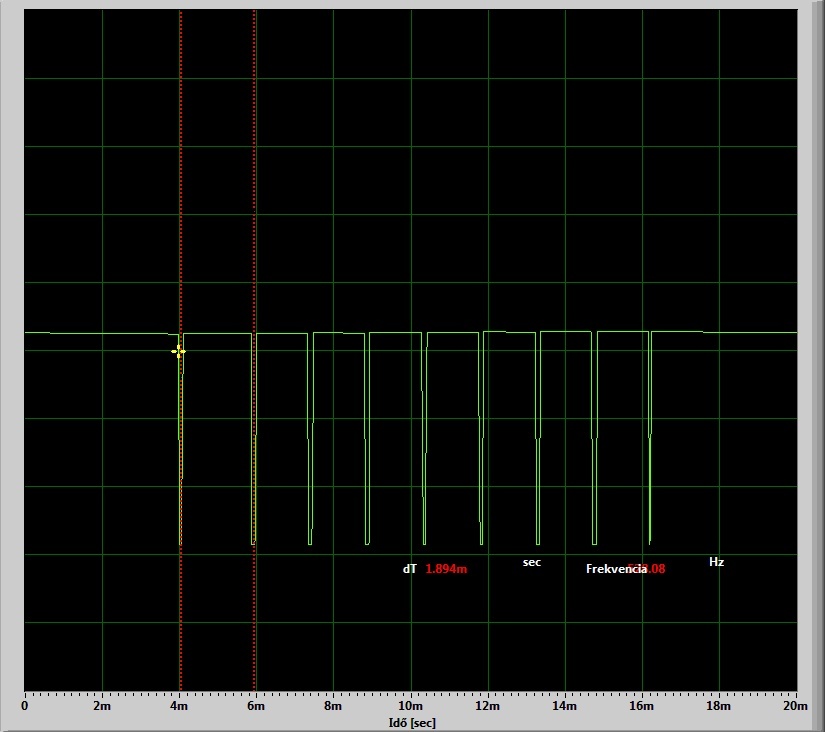
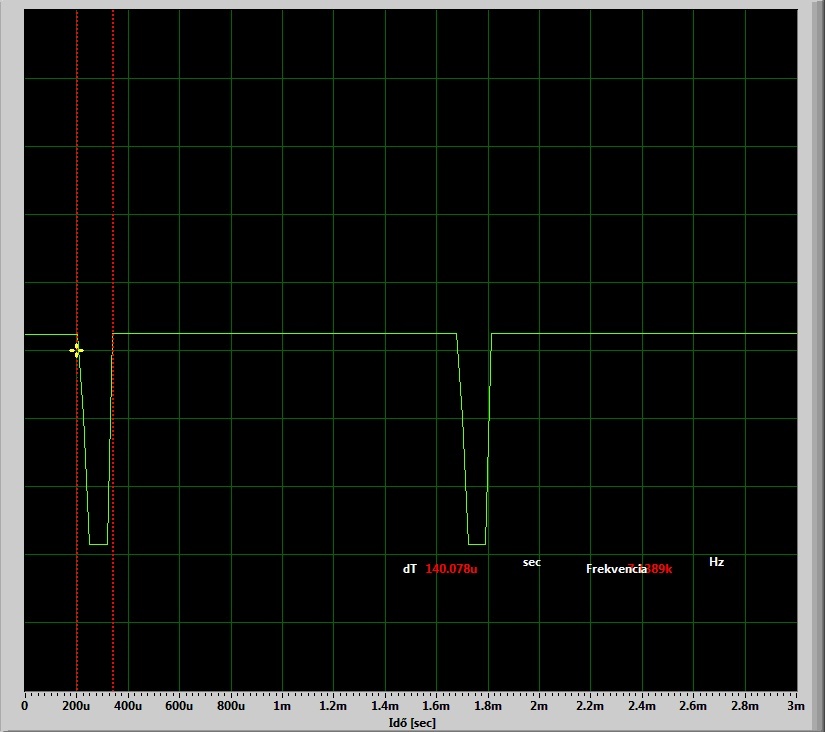
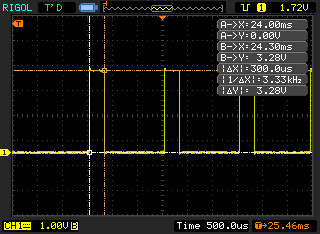
Each channel is separated from the next one by what you see as a dip in the voltage. Actually, that should be a low level lasting 300us if I remember right.
What is the low time of each short pulse? It is not clear in your picture, but it is not impossible that it lasts about that long.
So, concluding, I would say that in second glance, I don’t see anything wrong with this PPM frame.
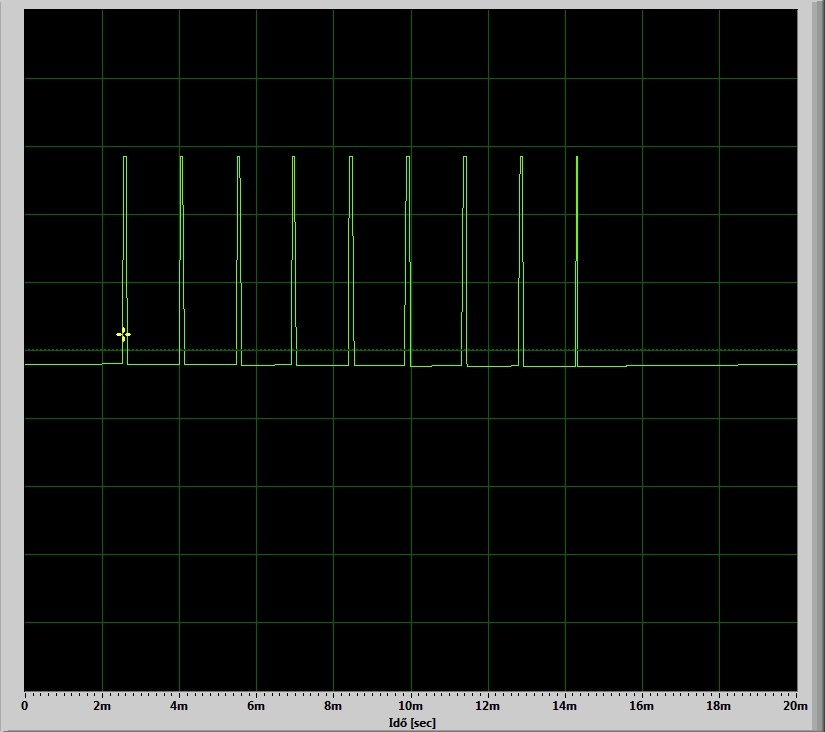
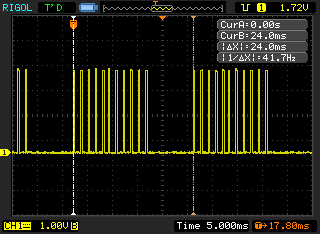
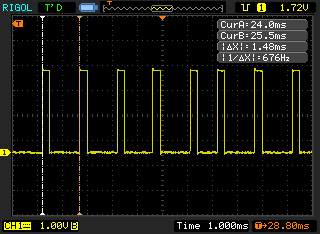
Here are some PPM snapshots from my ezUHF 8ch diversity receiver, as promised, but belatedly delivered.
As you can see, it has an 24ms frame and a 300ms pulse time.




{kind=link}
{kind=link}