Dear all,
I am hoping that I could get some support regarding my POZYX integration into a multicopter. I am trying to use POZYX as a non-GPS indoor navigation system. I have the basic setup as described here:
https://ardupilot.org/copter/docs/common-pozyx.html
I am using Pozyx firmware 2.2 and the latest libs.
I placed the anchors at different heights (12cm to 165cm) making sure not to create an even plane. The IDs of the anchors are ascending in the “N-shape”. In order to get a correct movement in the map, this results in the x-axis pointing up (from the lowest ID to the second lowest) and the y-axis pointing right. For a right hand coordinate system, this leads to a z-axis pointing down. That means if the copter ascents, the numbers will get smaller. Is that accounted for in the controller?
Obviously I adapted the Arduino sketch to avoid the assertation of the too high TX power, and made sure that the z-component is transmitted.
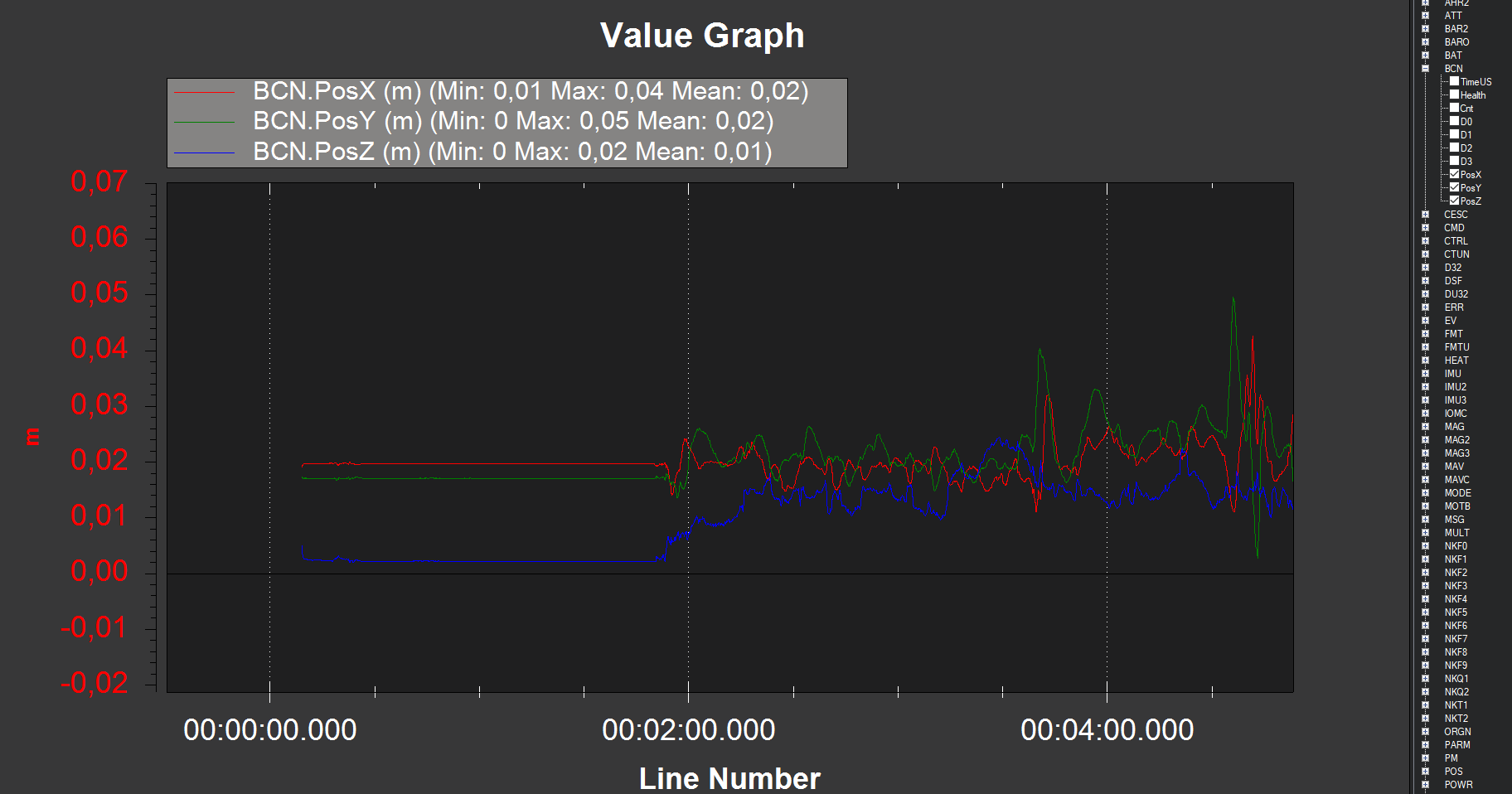
If I configure the copter system to use POZYX 2D position data only, everything looks pretty well and acts as it is supposed to. But when I enable the z component (i.e. set the alt source of the EKF to 3), everything goes sideways. The IMUs stop aiding and pitch and roll angles are indicated even if the copter stands still.
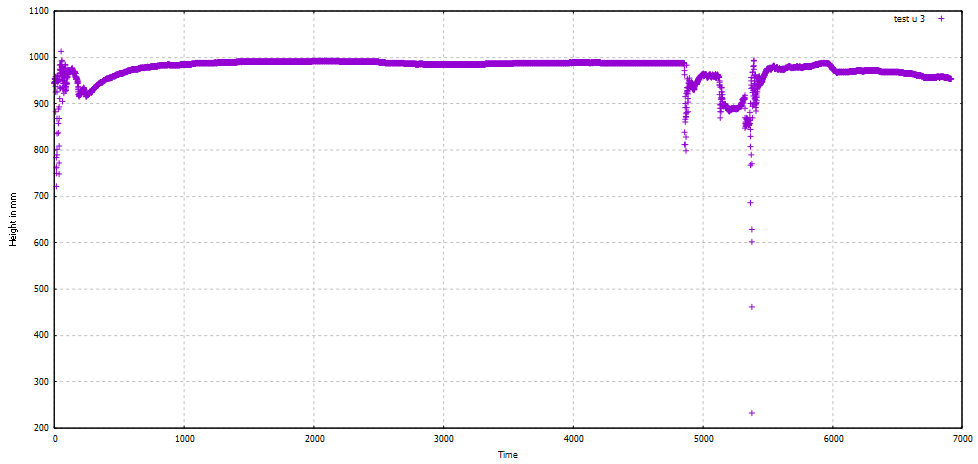
I am using the POZYX_POS_ALG_TRACKING algorithm on Arduino and looking at the output data directly the z component looks rather good to me:
The xy position is fine from my point of view:
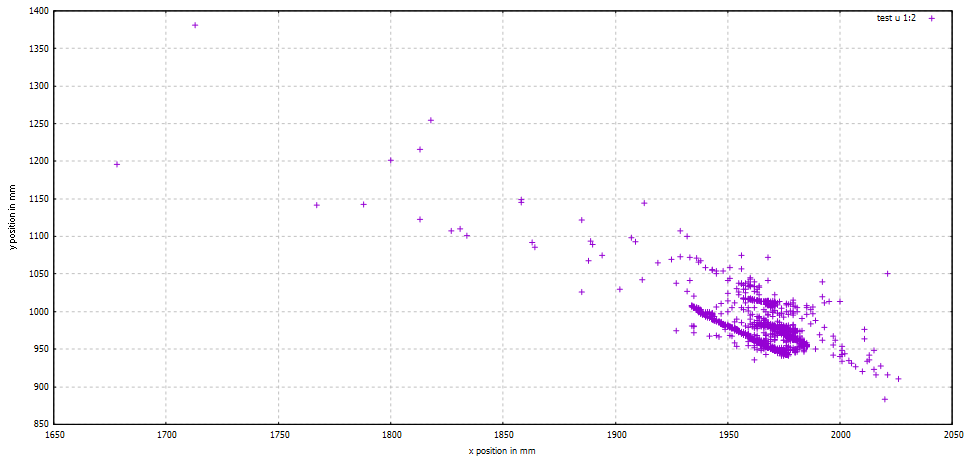
The spikes are likely caused by myself walking to the copter.
I am thankful for any hints! Thank you very much!!!